当物理学遇上人工智能
2020-08-09, CCNU (注:按 f 键全屏)
人脸识别 (Who)

身份认证, 刷脸支付
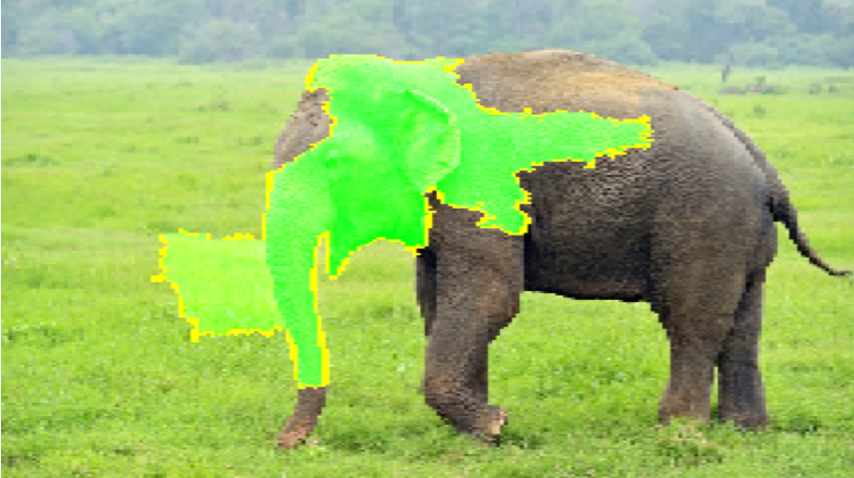
图像语义分割 (What and where)

智能医疗,智能农业,智能工业,自动驾驶
人工智能发展里程碑

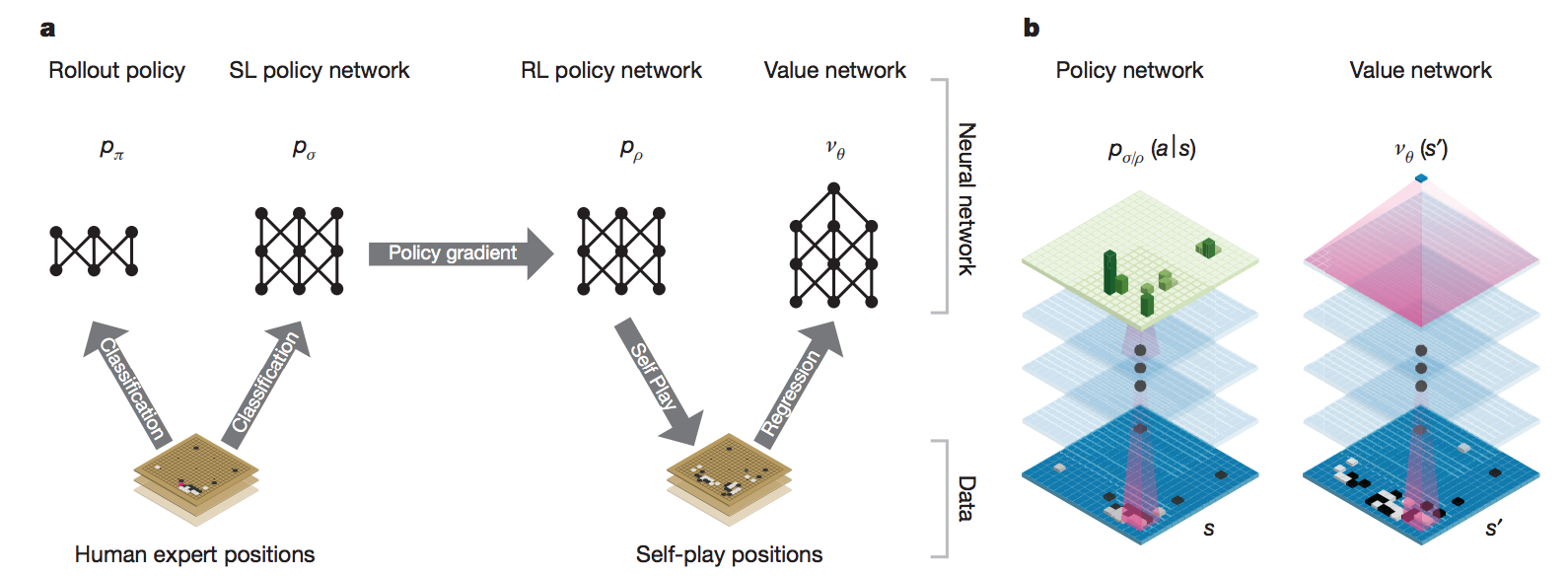
2016年3月,AlphaGo 打败围棋前世界冠军李世石
自我对弈训练的 AlphaGo Zero
战略网络(Value Network)与战术网络(Policy Network)
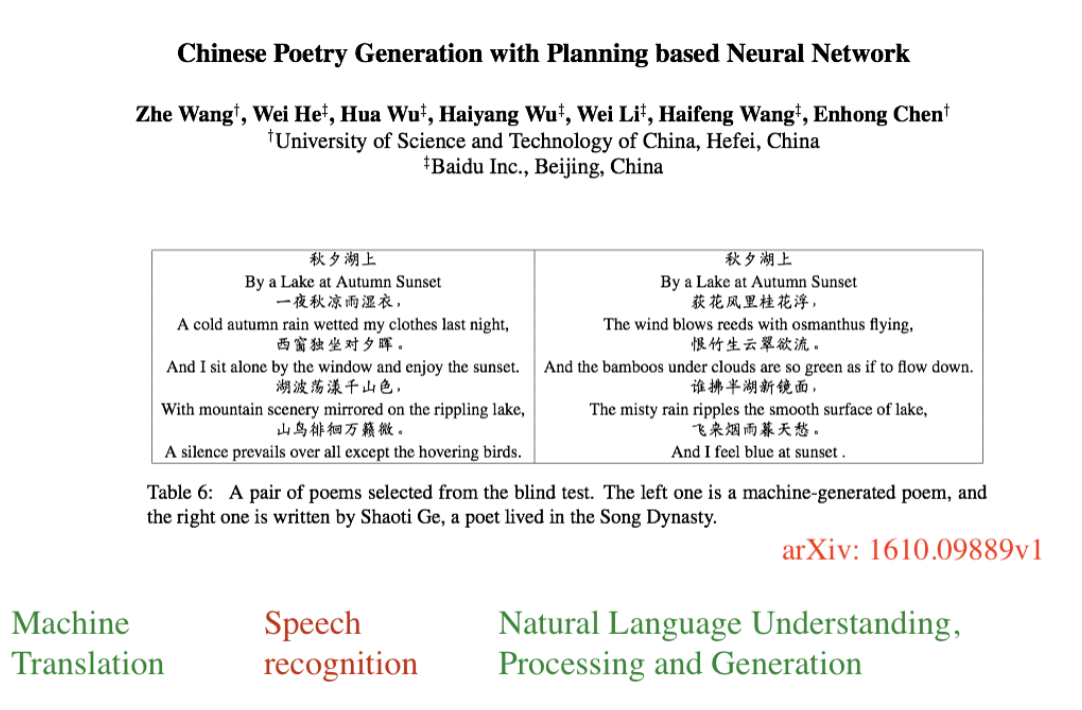
自然语言处理
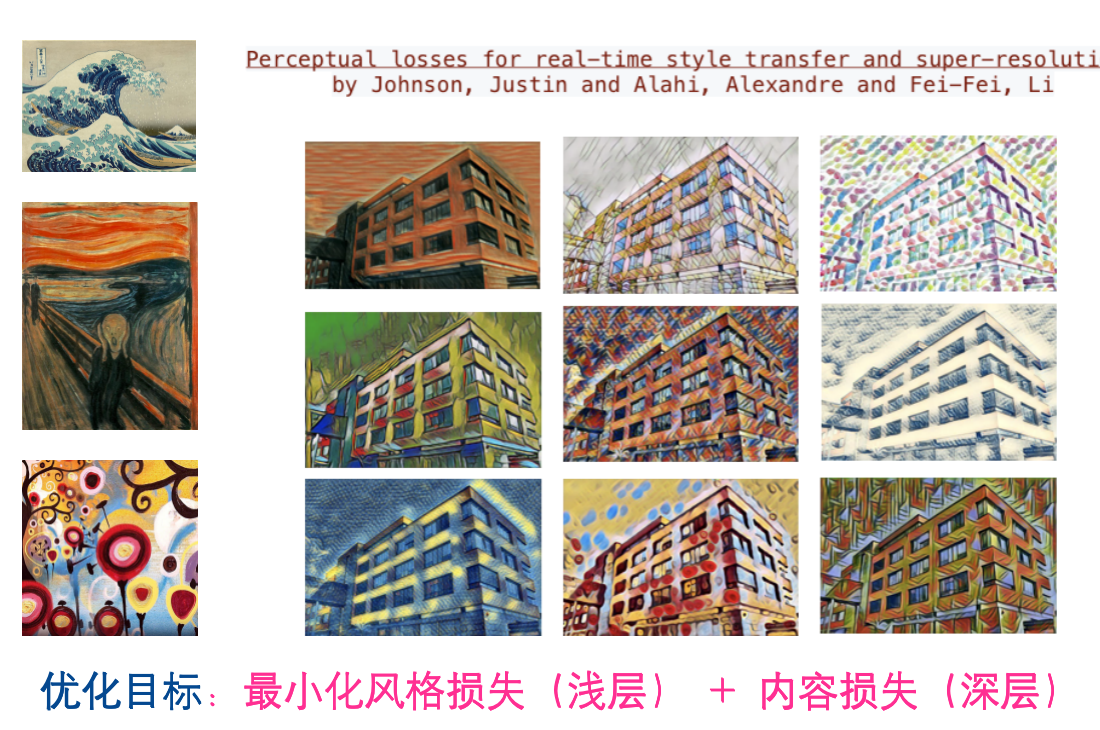
图像风格转化
新冠肺炎识别

阿里达摩院,腾讯,华为…
深度学习是什么
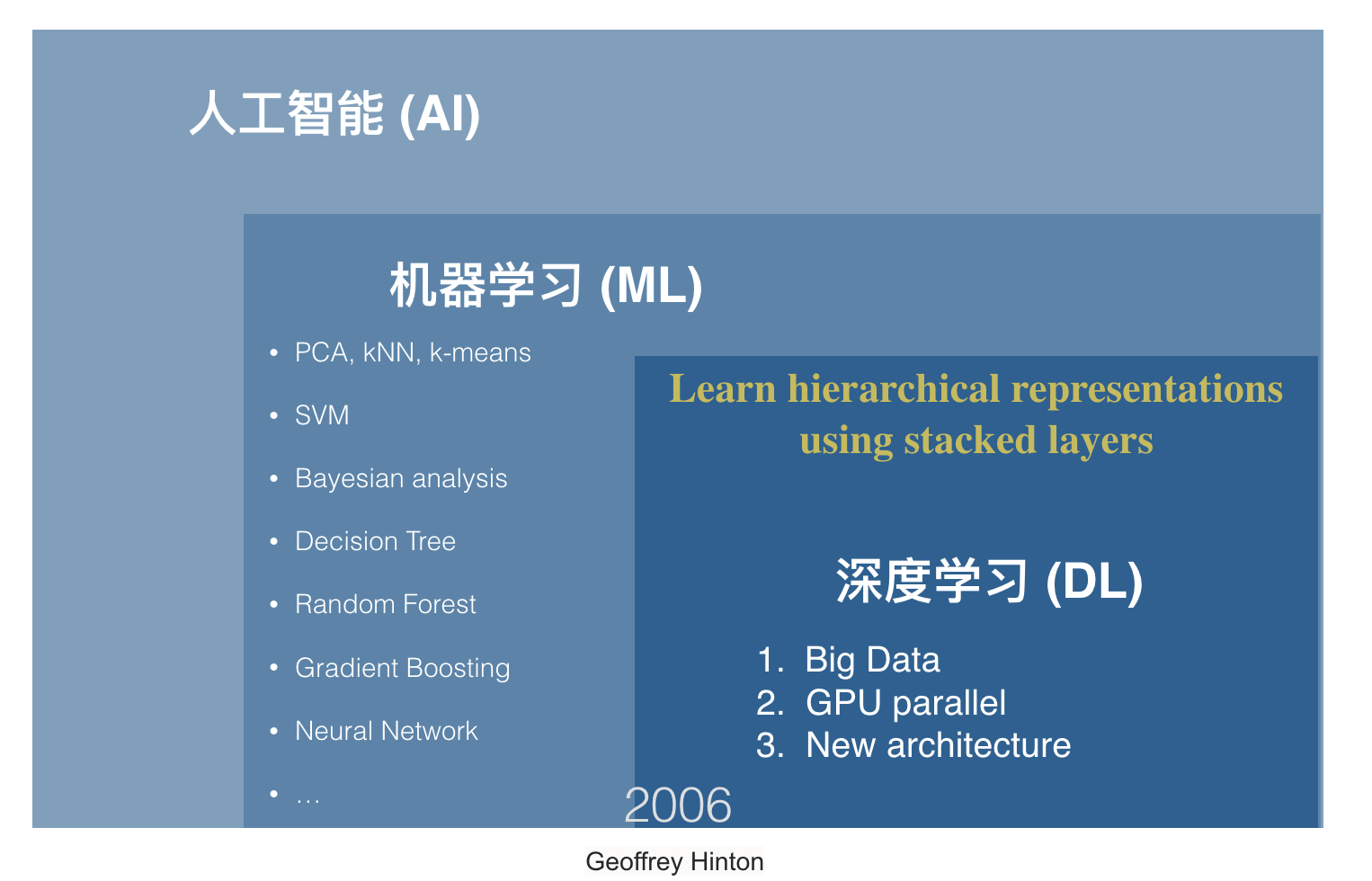
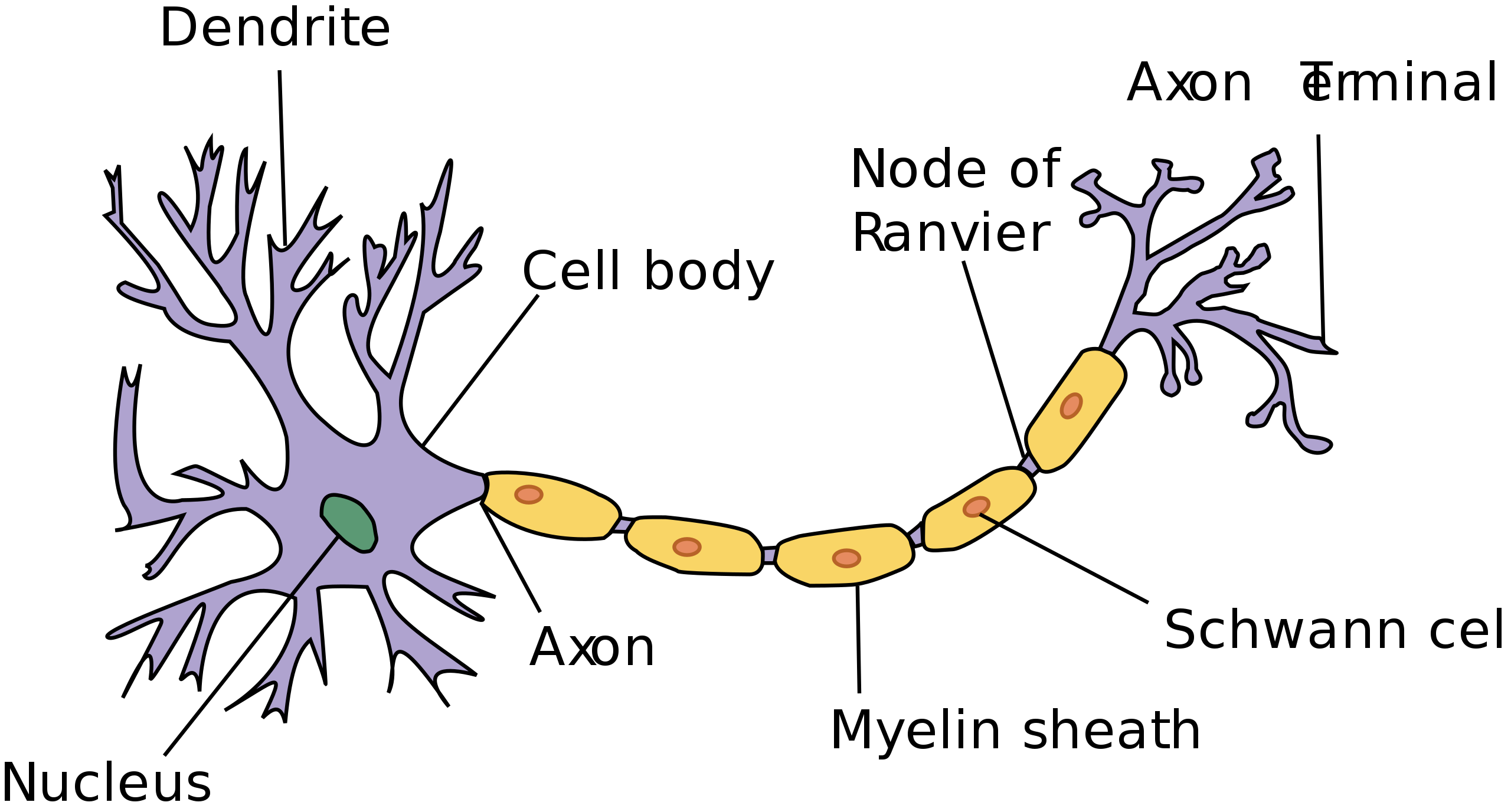
人类大脑的启发

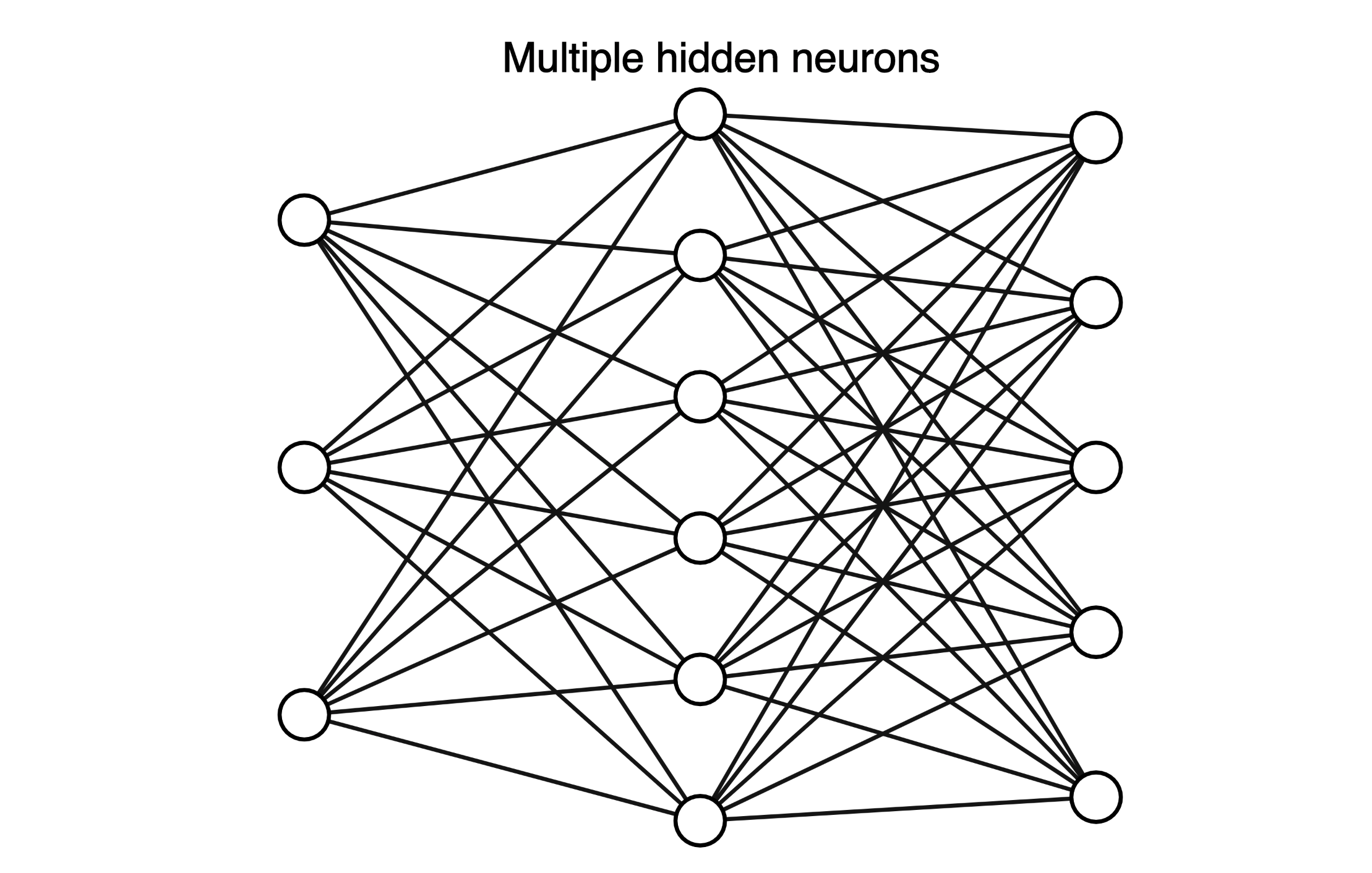
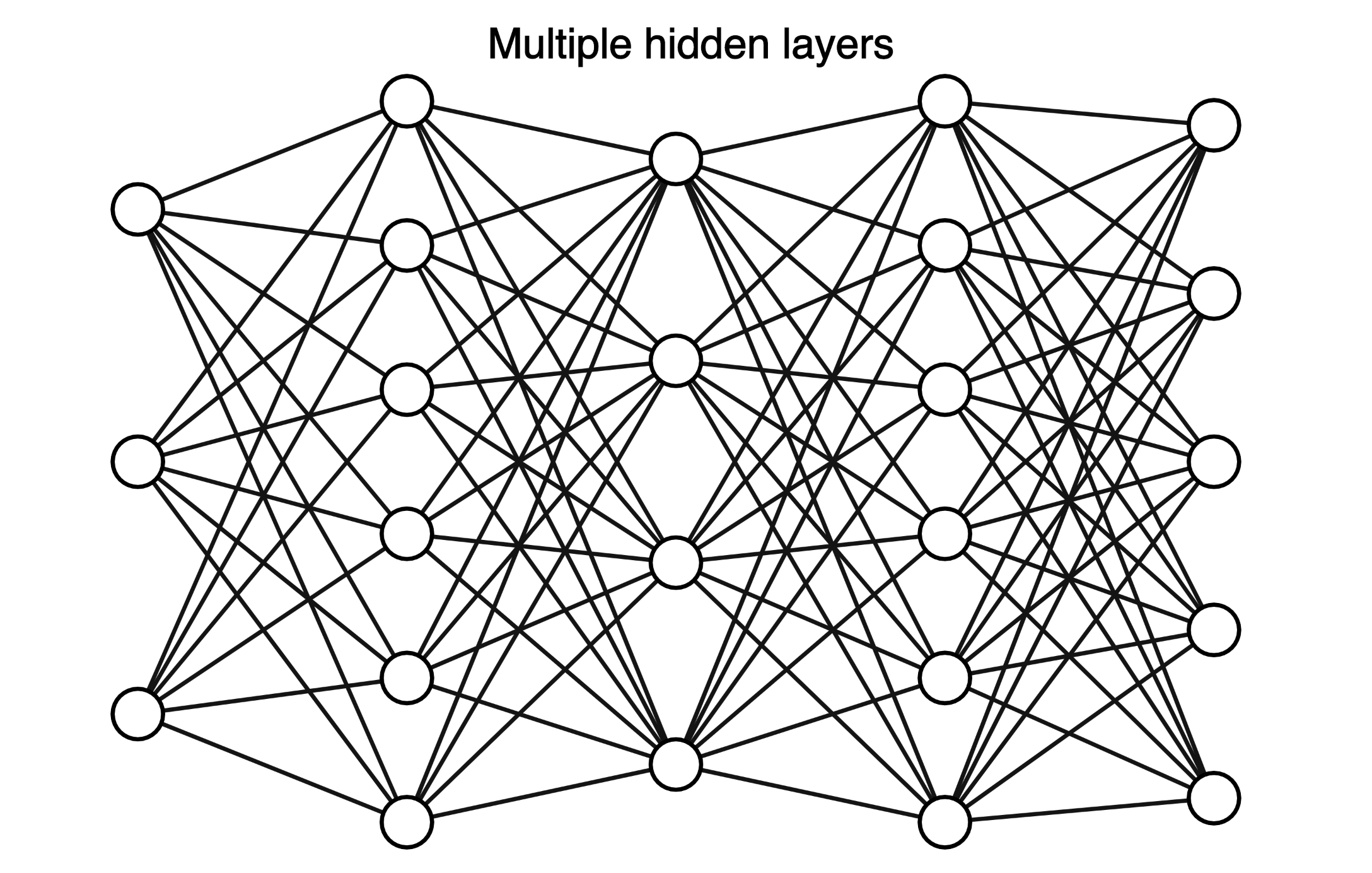
对大部分人来说,深度学习 = 多层人工神经网络
生物神经元

层级化的特征表示

机器如何学习:前馈

机器如何学习:误差的向后传递
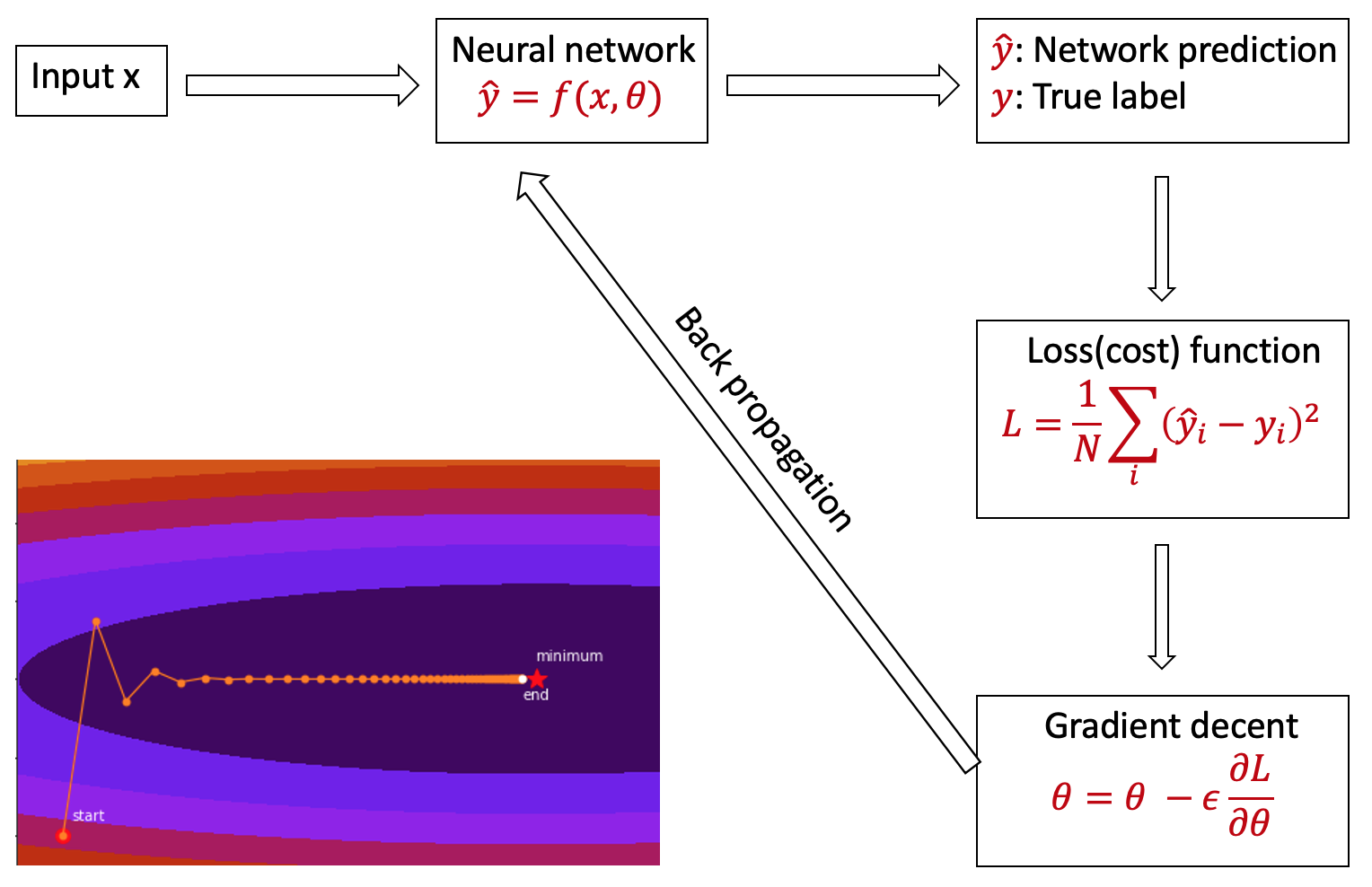
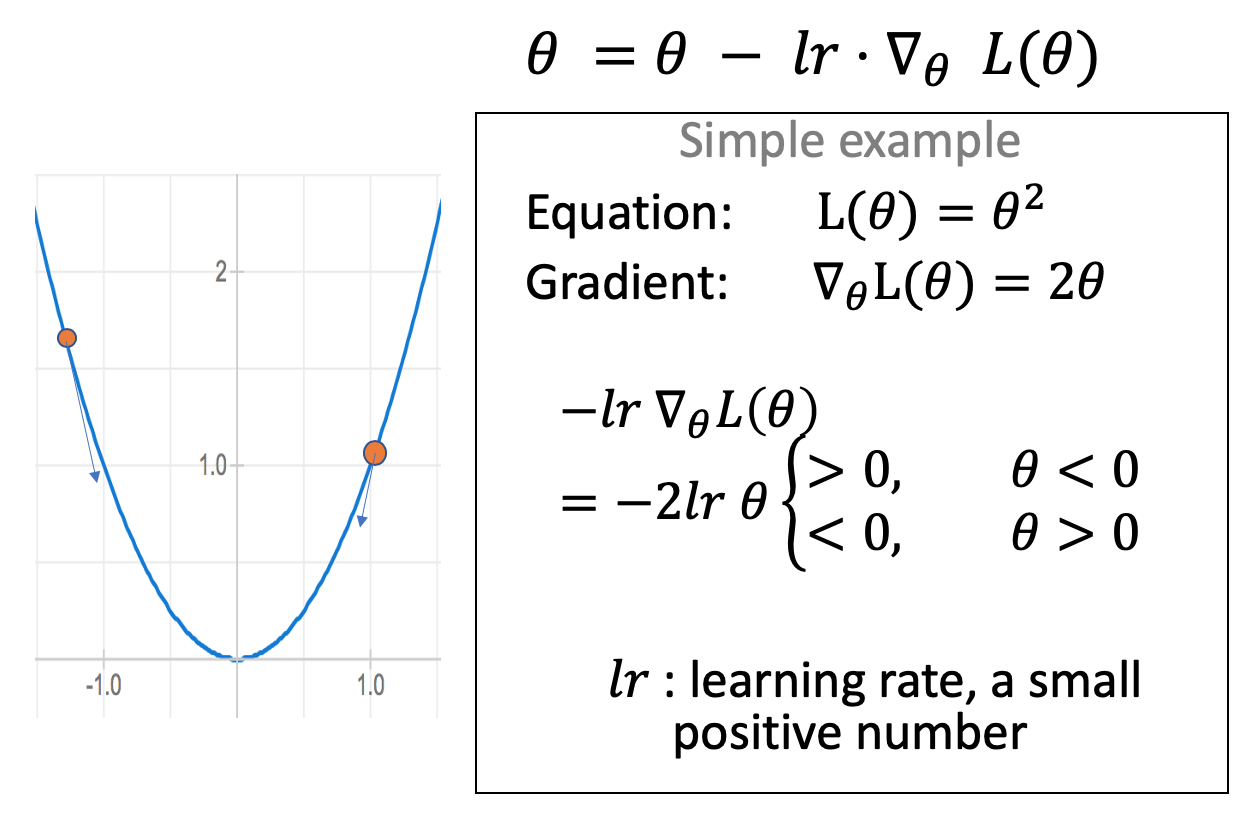
1 维梯度下降举例
动量机制:越过局域极小值点
局域极小值?
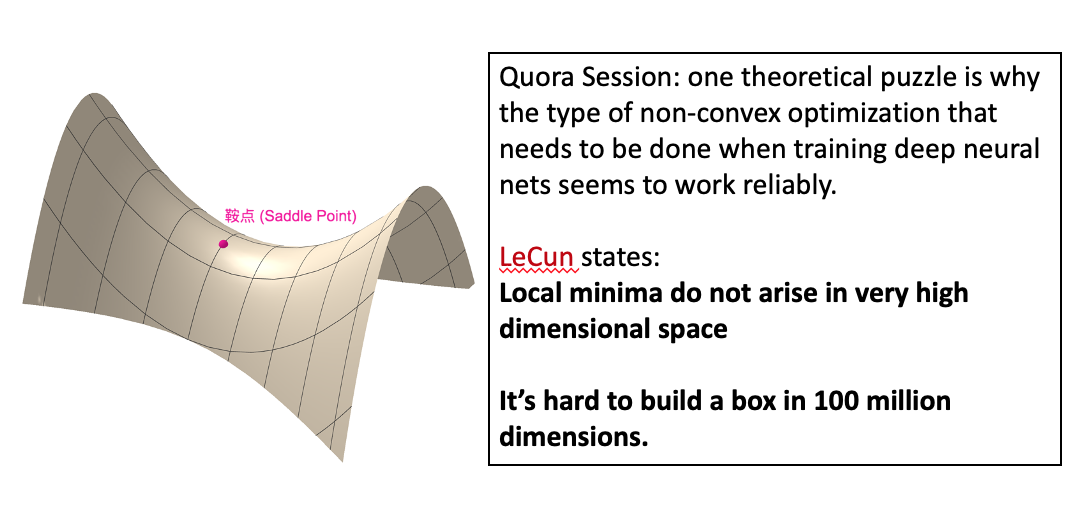
\(P(极小值)= 0.5^n \sim 0\) 其中 n 是神经网络参数个数。
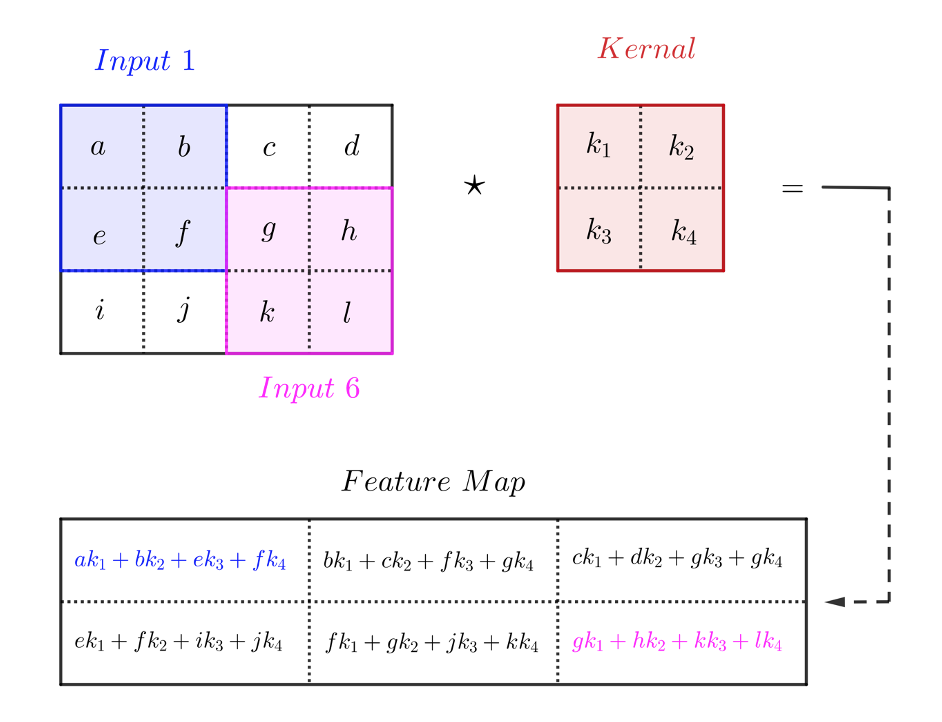
2 维卷积
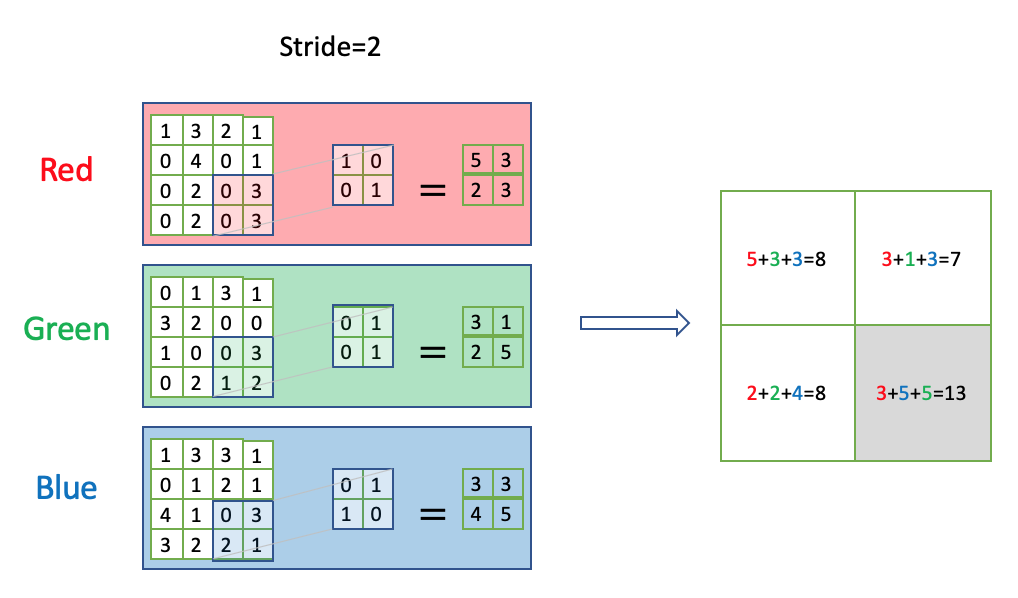
卷积的多输入通道
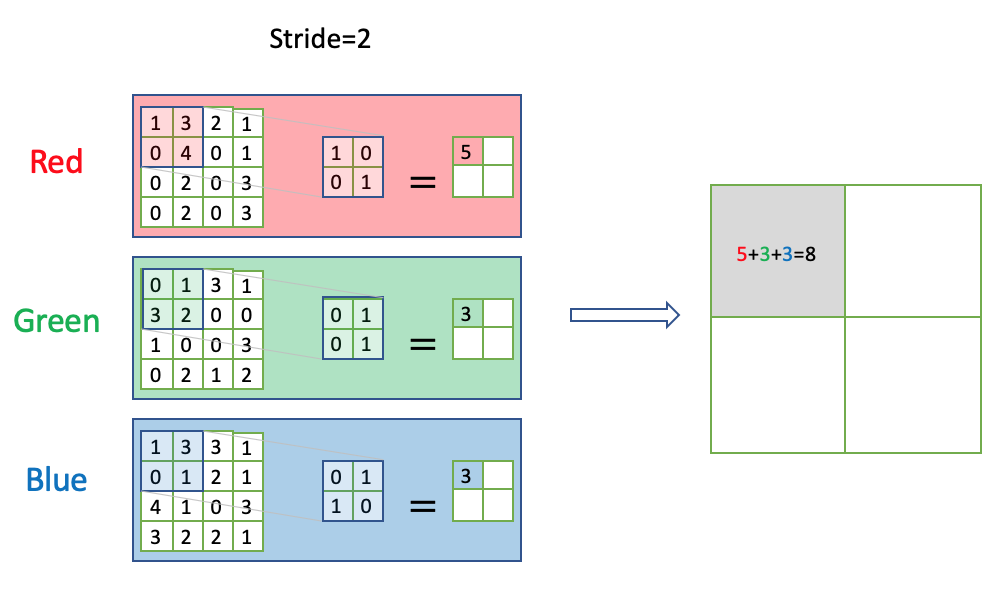
卷积的多输入通道
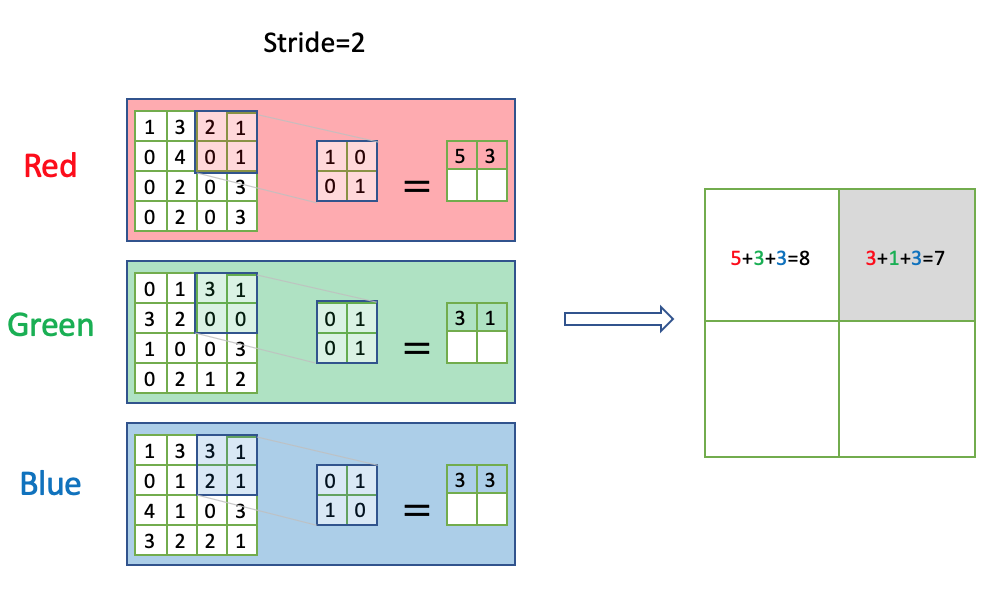
卷积的多输入通道
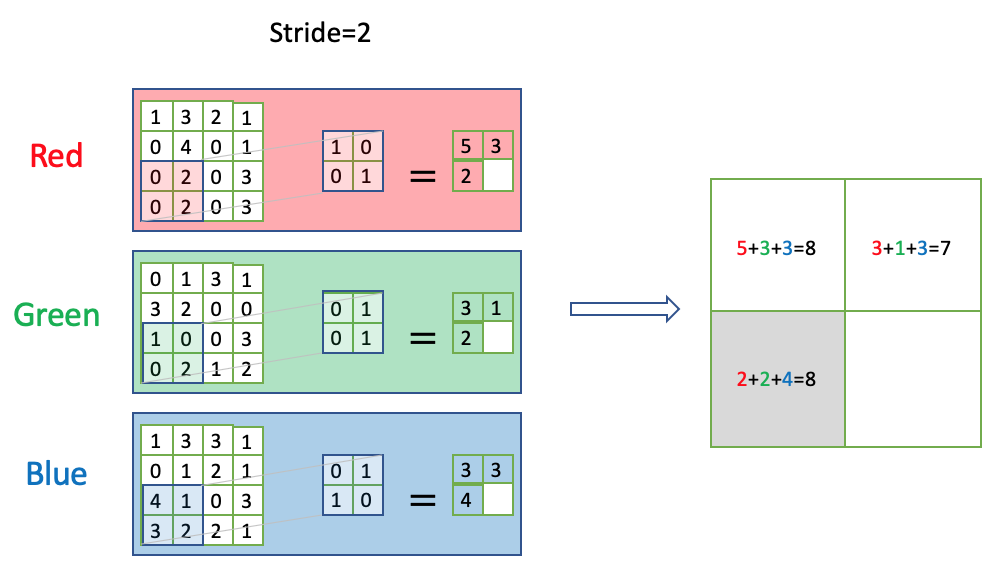
卷积的多输入通道
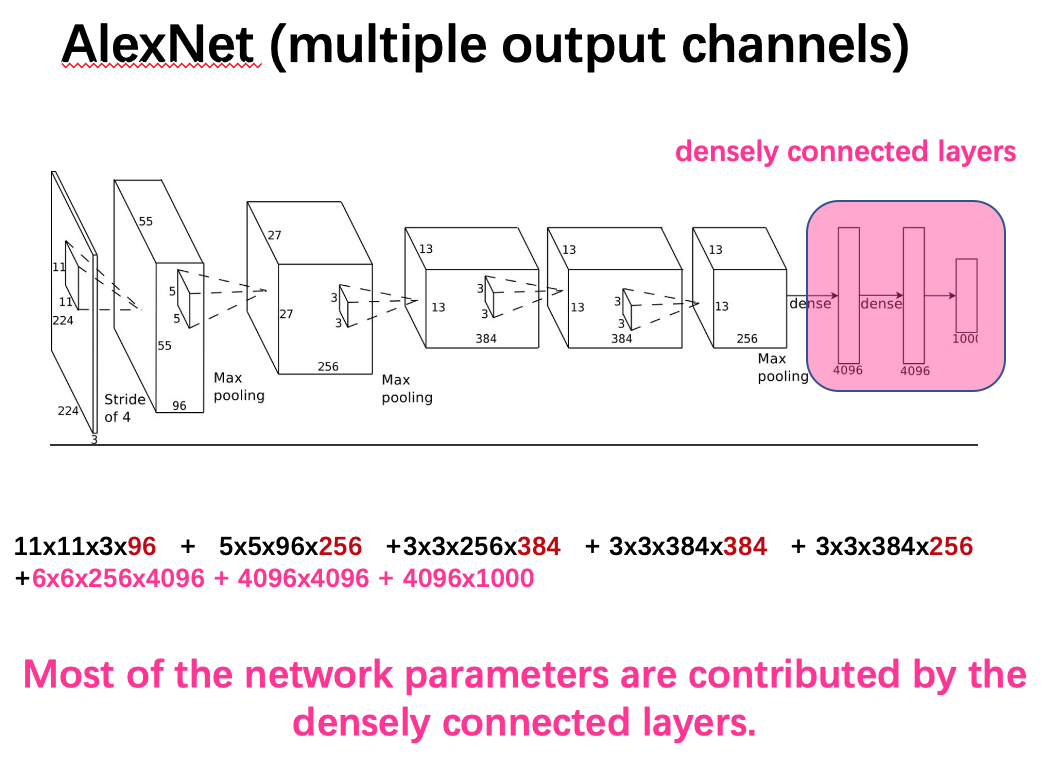
卷积的多输出通道(AlexNet)
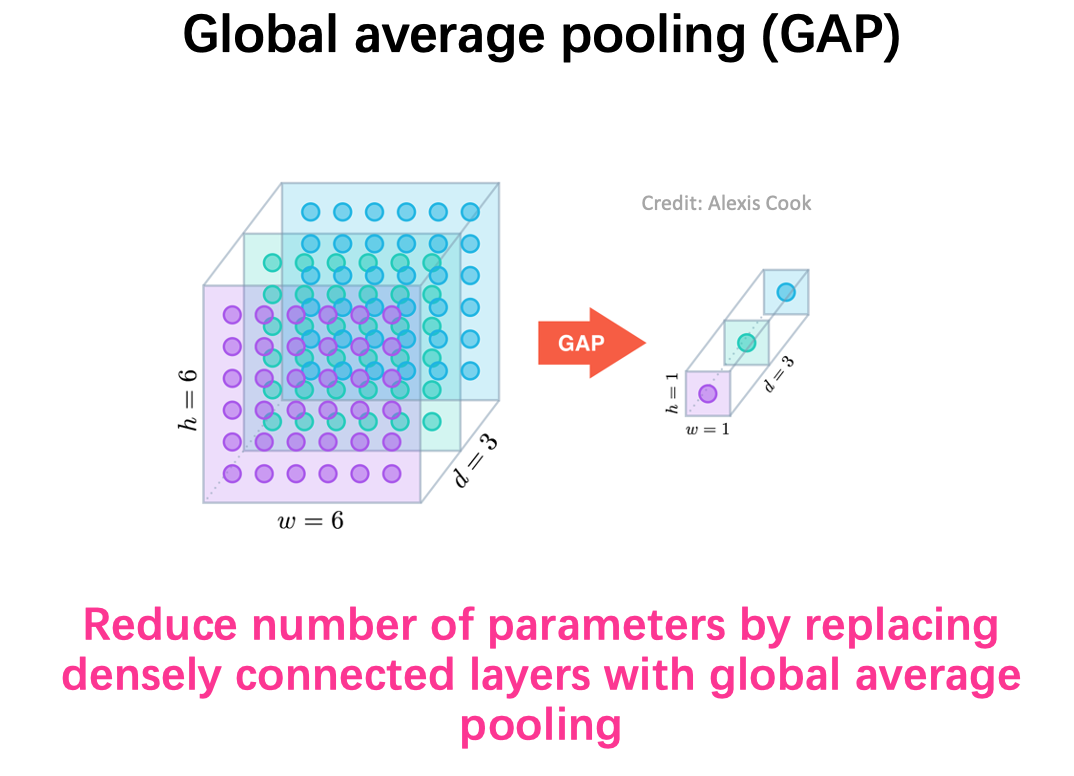
Global Average Pooling
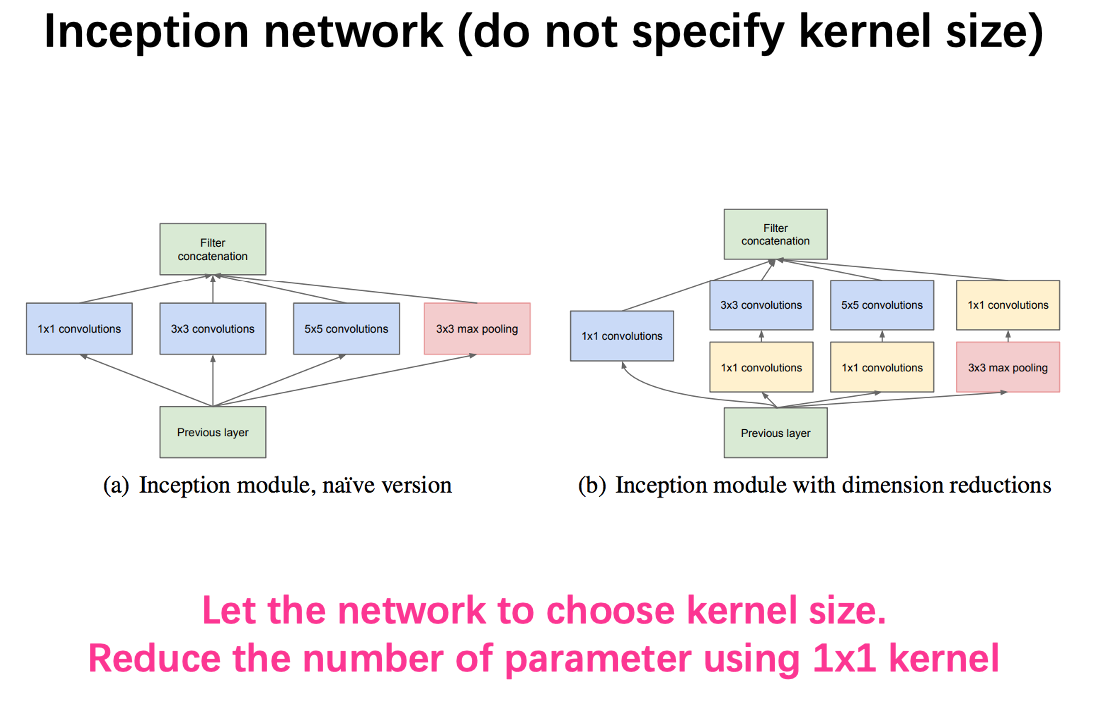
Inception Net
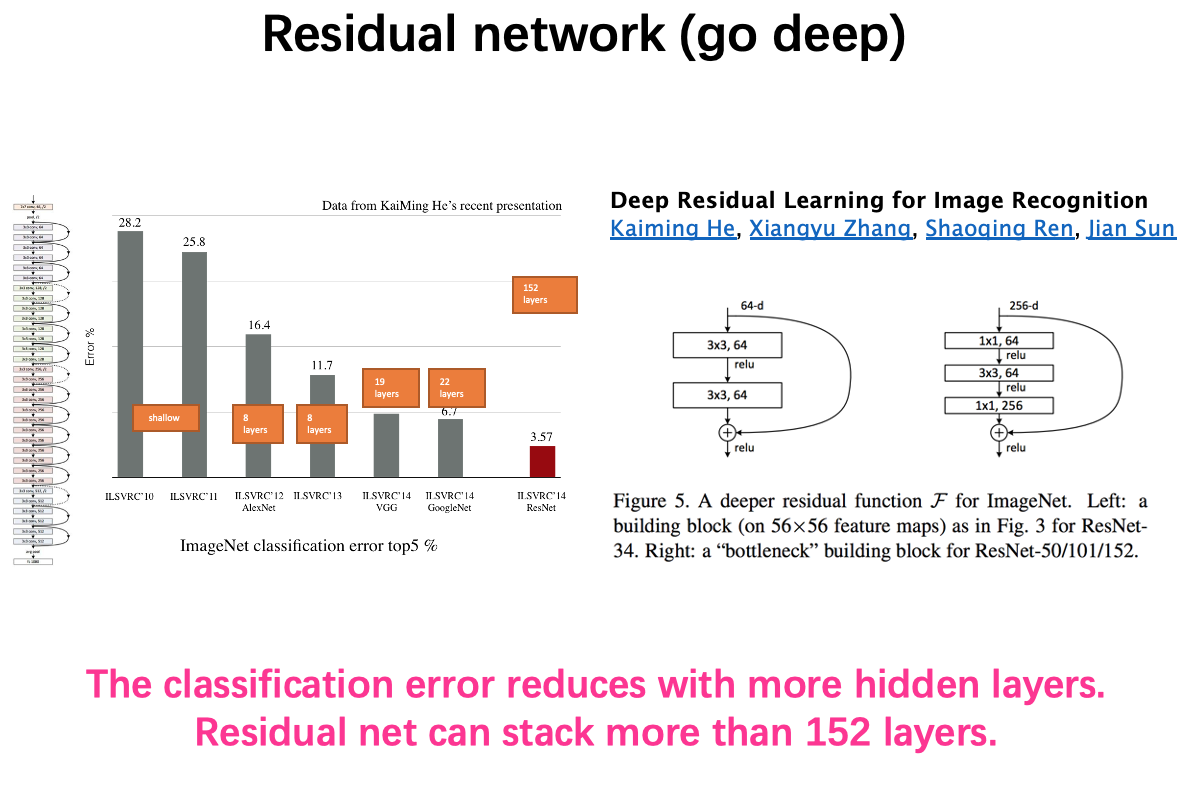
Residual Net
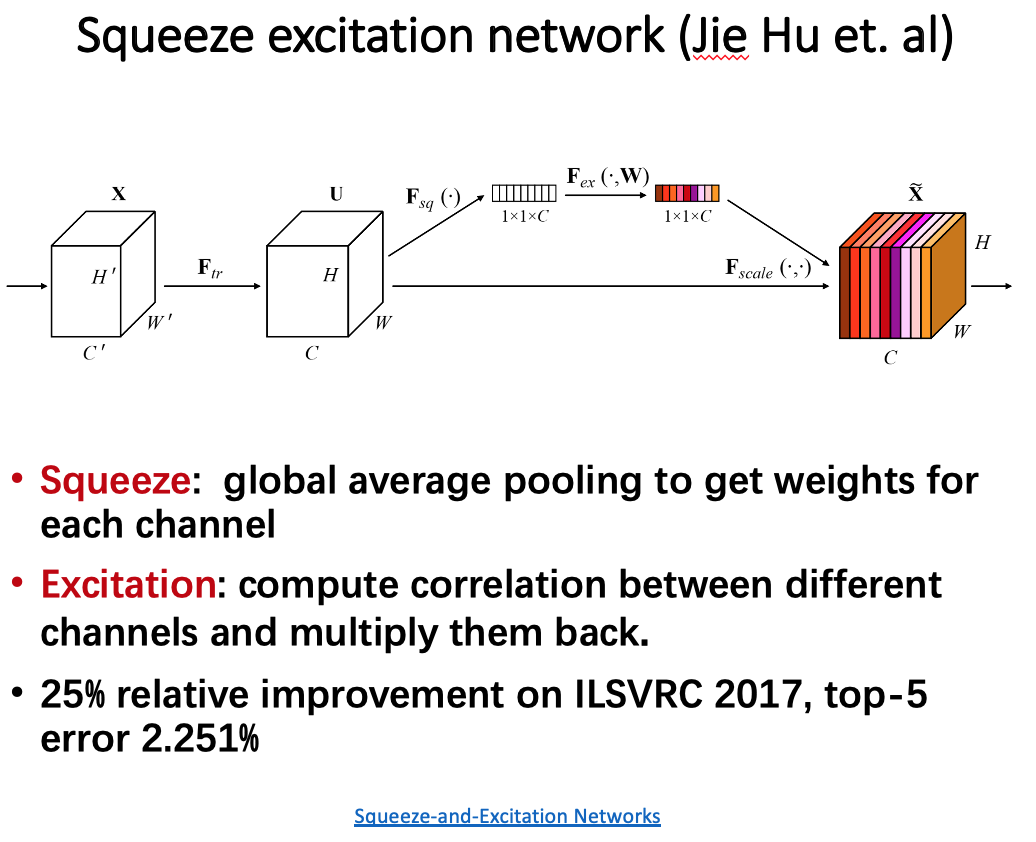
Squeeze Excitation Network
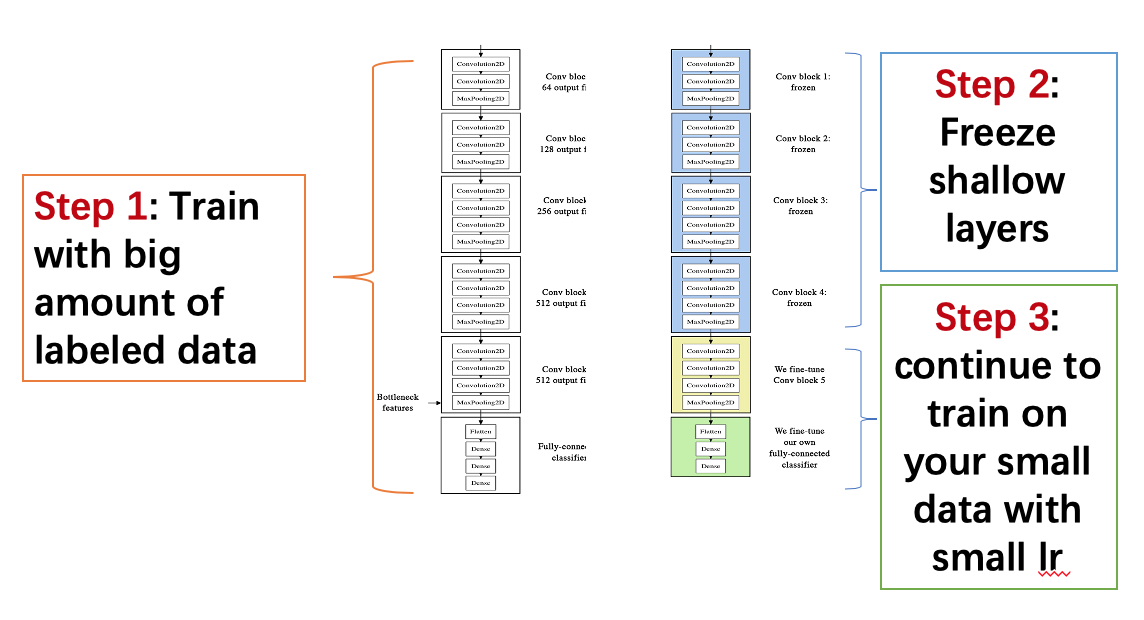
小数据上迁移学习 Fine Tune
半监督学习
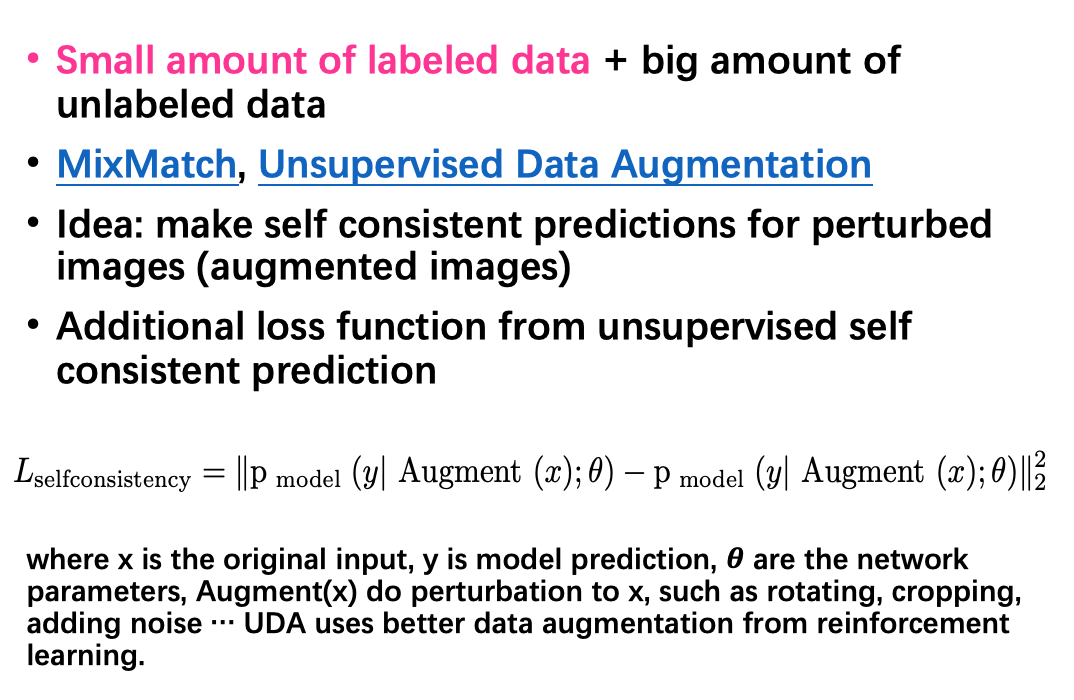
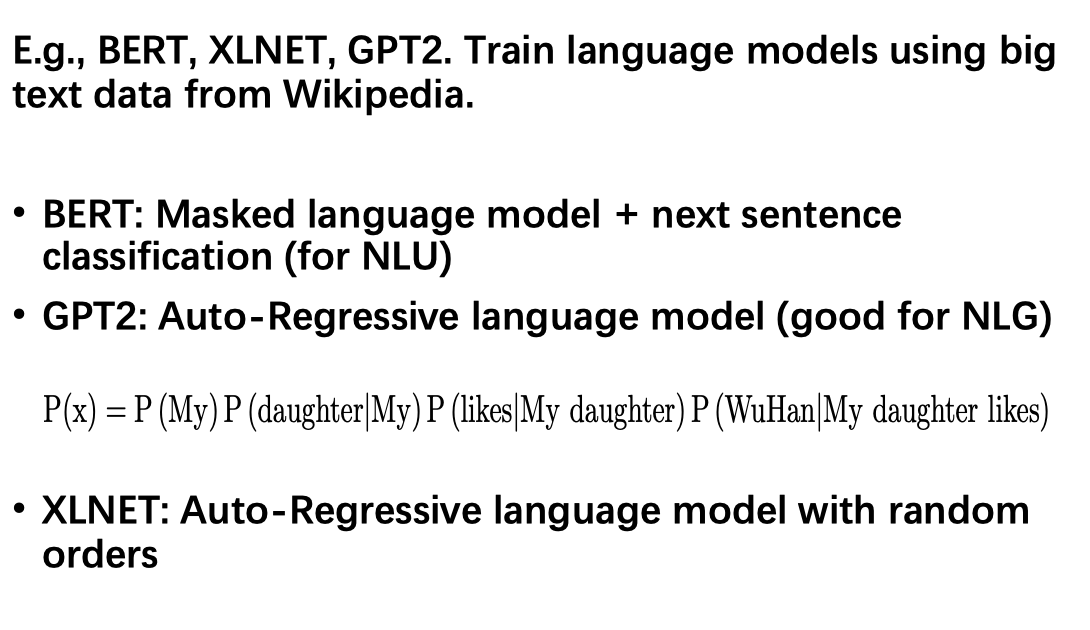
自监督学习
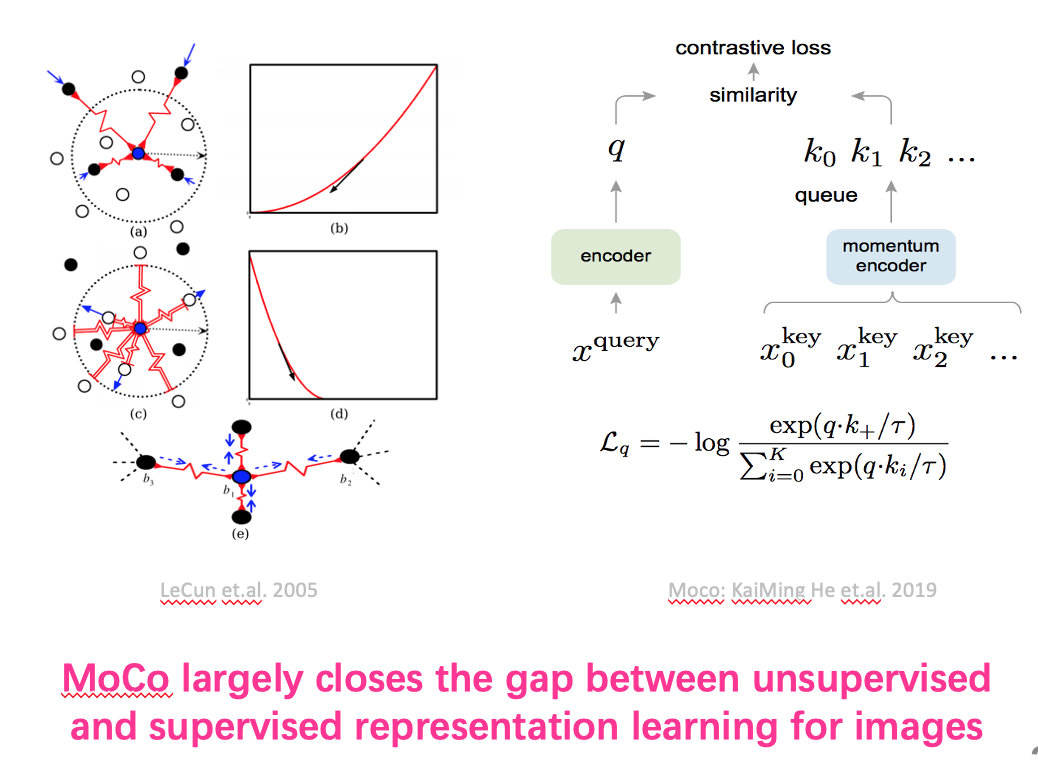
对比学习 (MoCo)
全局解释
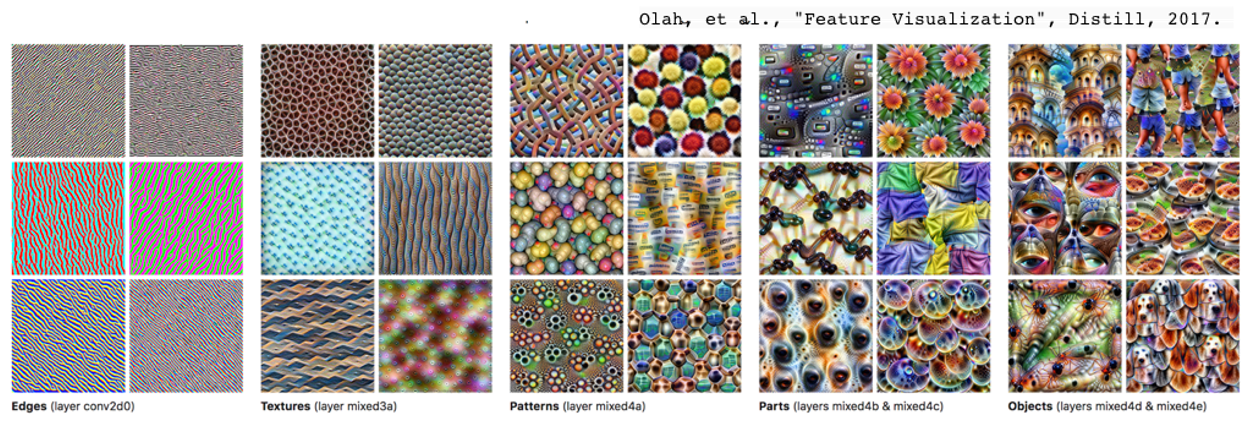
梯度上升法,最大激活某个神经元
局部解释(替换法)
局部替换法,LIME或Prediction Difference Analysis
M. Tulio Ribeiro, et. al. “Why should I trust you?”
局部解释(类激活地图)

将深层卷积映射回输入图片
BoLei Zhou, et. al. “Learning Deep Features for discriminative localization”, CVPR 2016
局部解释(积分梯度法)
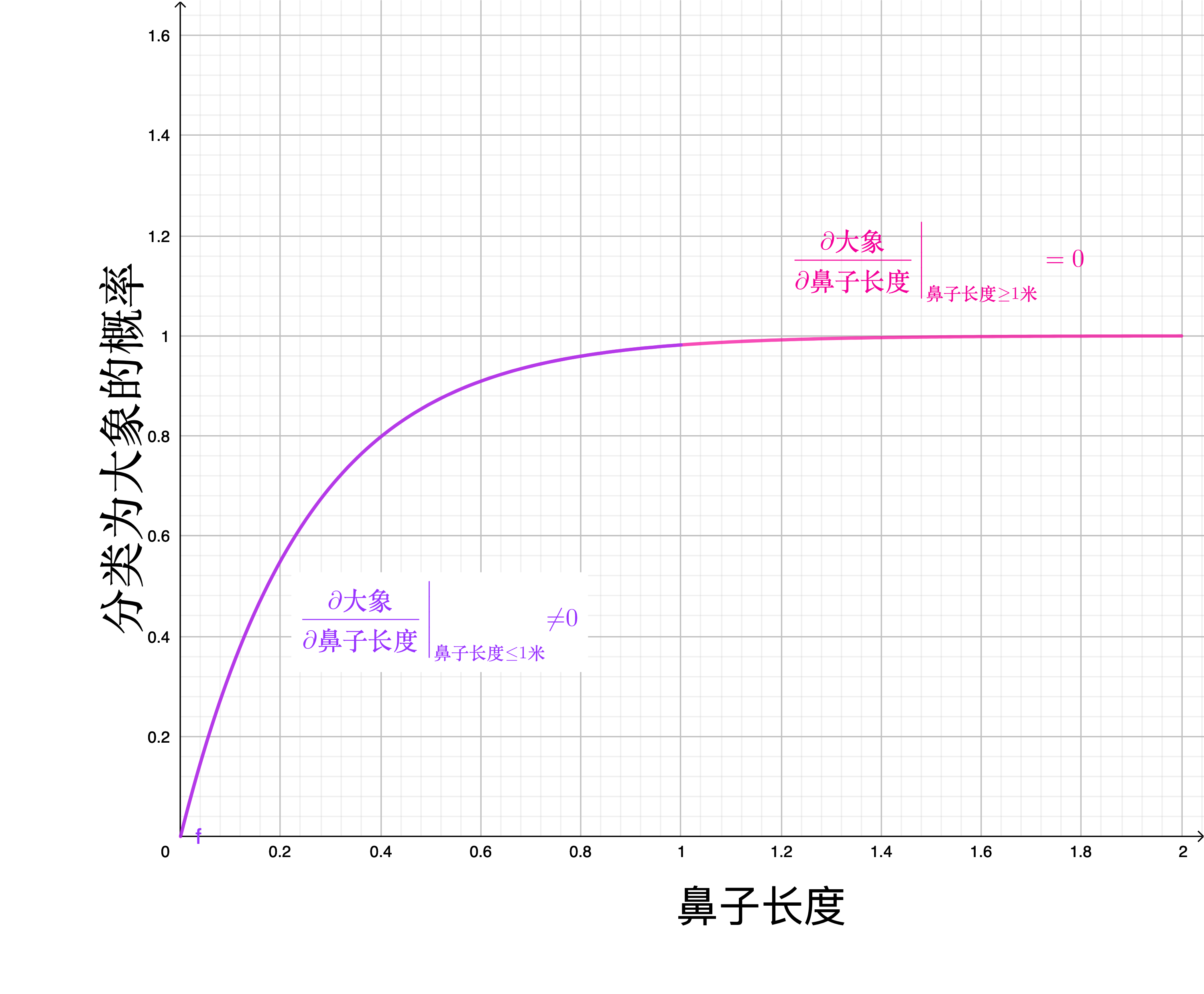
\(特征重要性 = \int_{0米}^{2米} \frac{\partial 大象}{\partial 鼻子长度} \quad\ d 鼻子长度\)
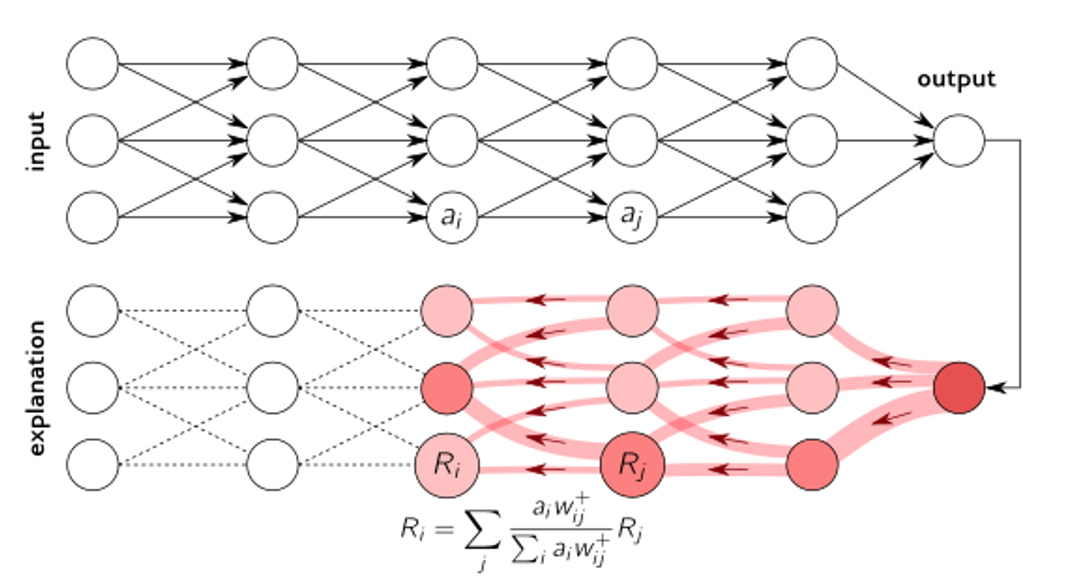
局部解释法(层间相关性传递)
贝叶斯神经网络
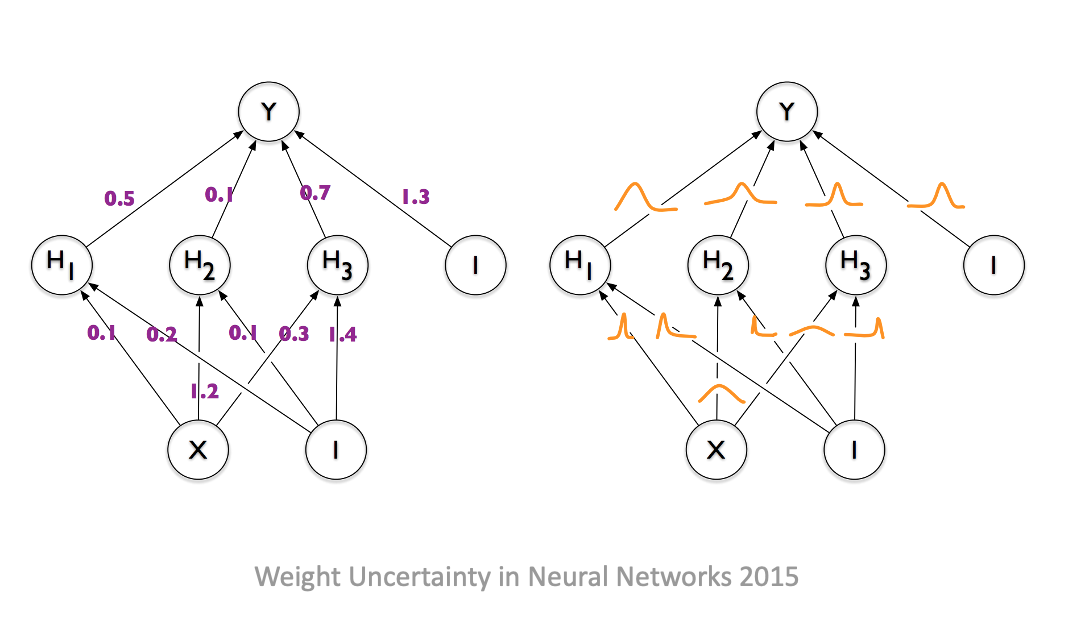
两倍的参数实现无穷多神经网络的系综。
蒙特卡洛 Dropout
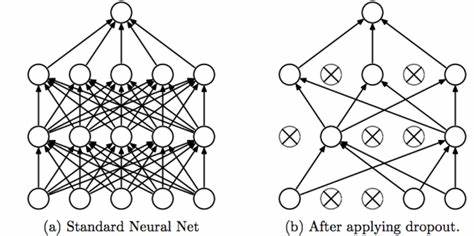
测试阶段打开Dropout, 生成神经网络系综
健壮: 免疫对抗样本攻击
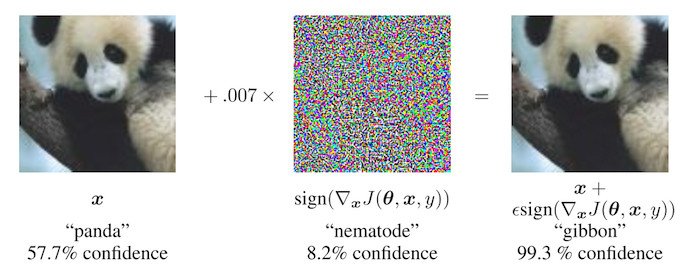
- 脆弱的模型眼中:熊猫 + 噪点 = 长臂猿
- 健壮的模型需要针对对抗样本训练
无偏见: 对训练数据进行无偏化处理
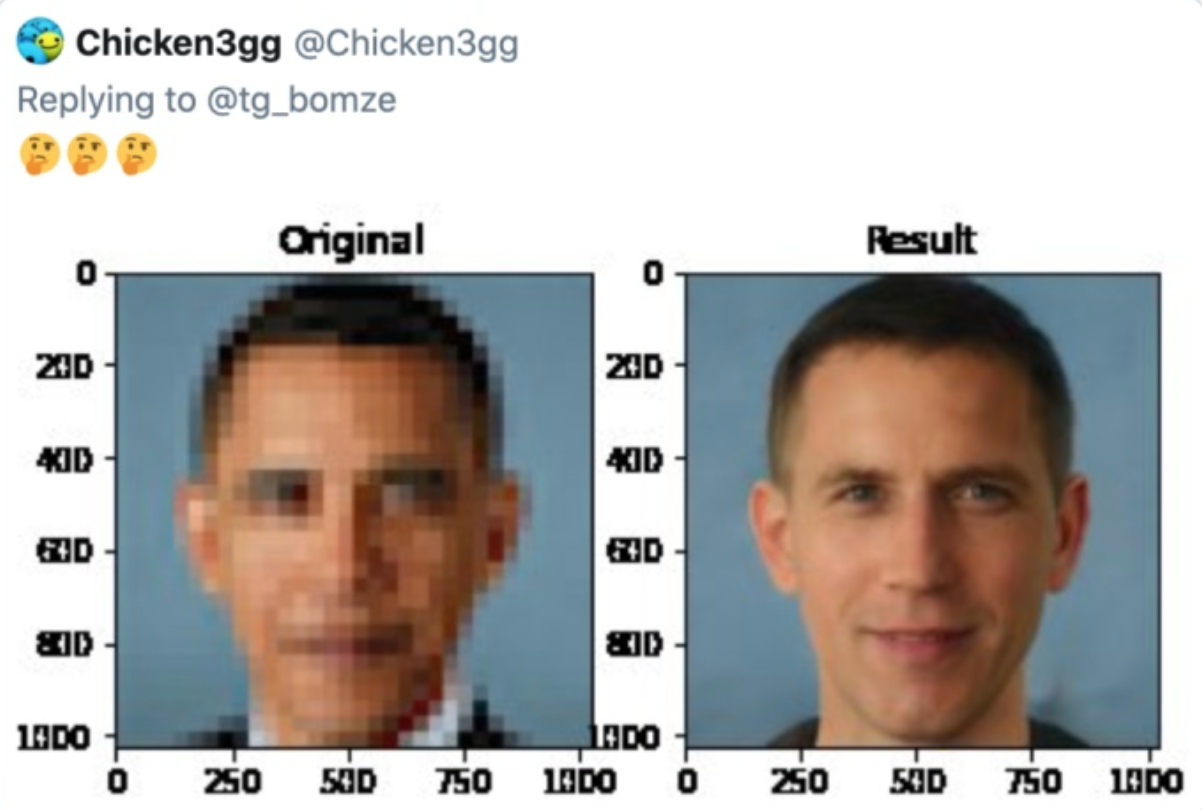
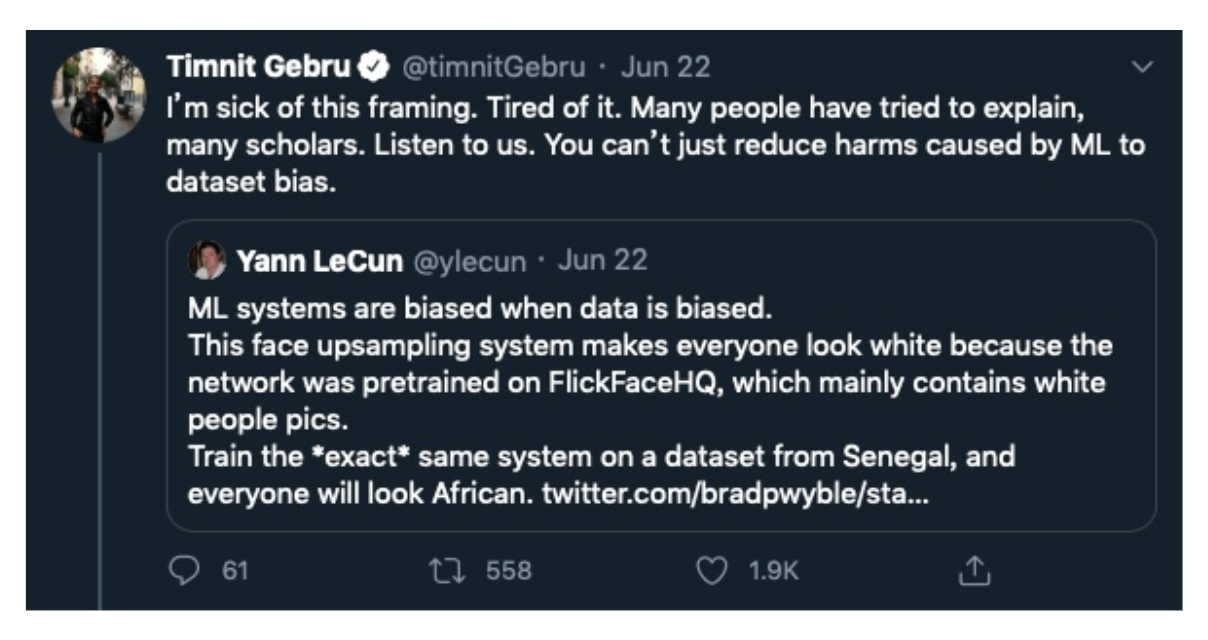
Duke大学开发的超分辨率程序 PULSE, 存在将低分辨率奥巴马照片恢复成白人的偏见。 Yann LeCun 因其个人言论被骂退出 Twitter。
世界知名深度学习机构举例
DeepMind 
OpenAI 
BaiDu 
讯飞 
腾讯 
华为 
书籍与视频


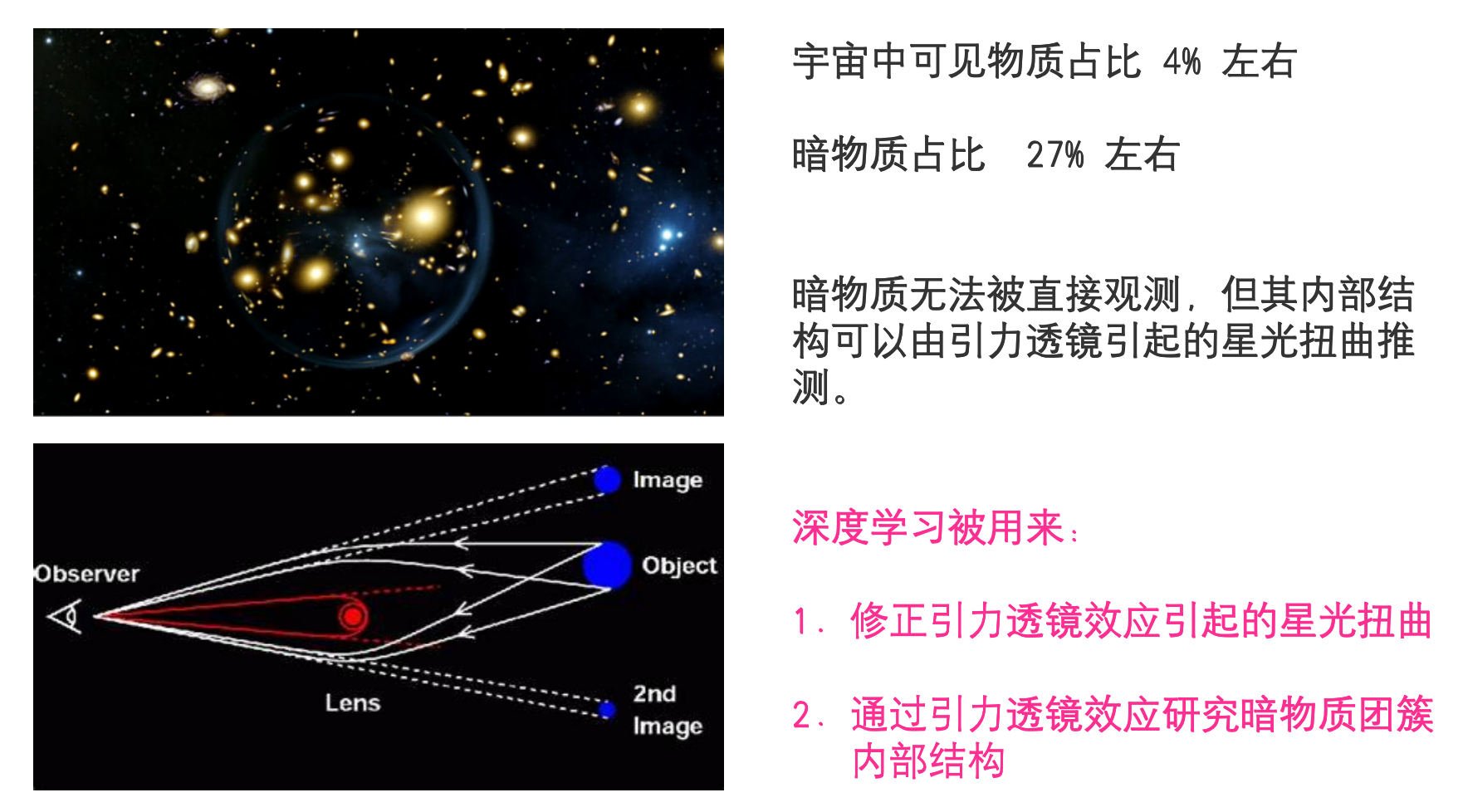
天体物理中反问题
高能核物理中反问题
- QGP 寿命\(\sim 10^{-23}\) 秒,无法直接探测
- 反问题(1)通过高能部分子穿过QGP时能损,反推QGP性质
- 反问题(2)通过 QGP 冷却后的强子分布,反推QGP性质
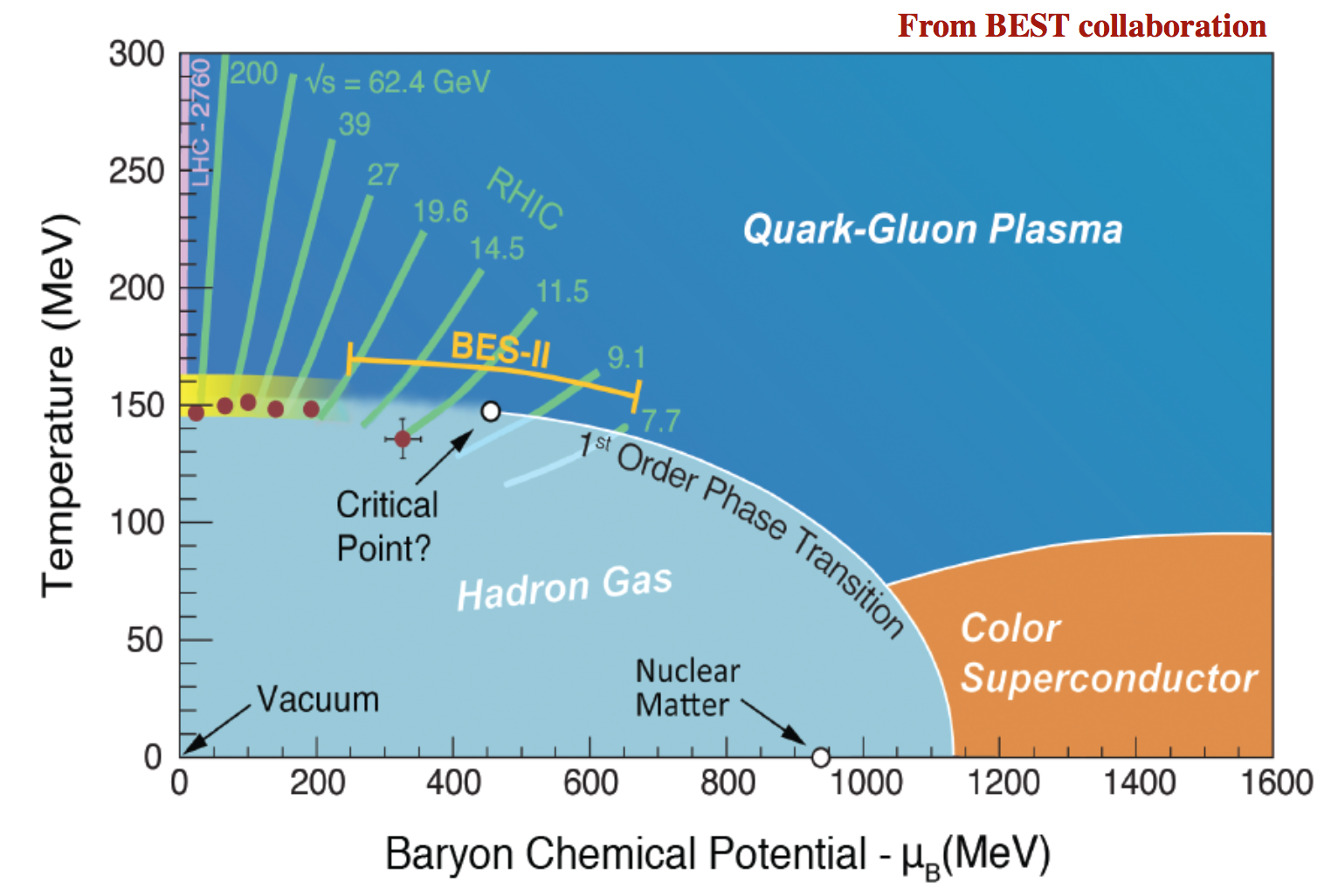
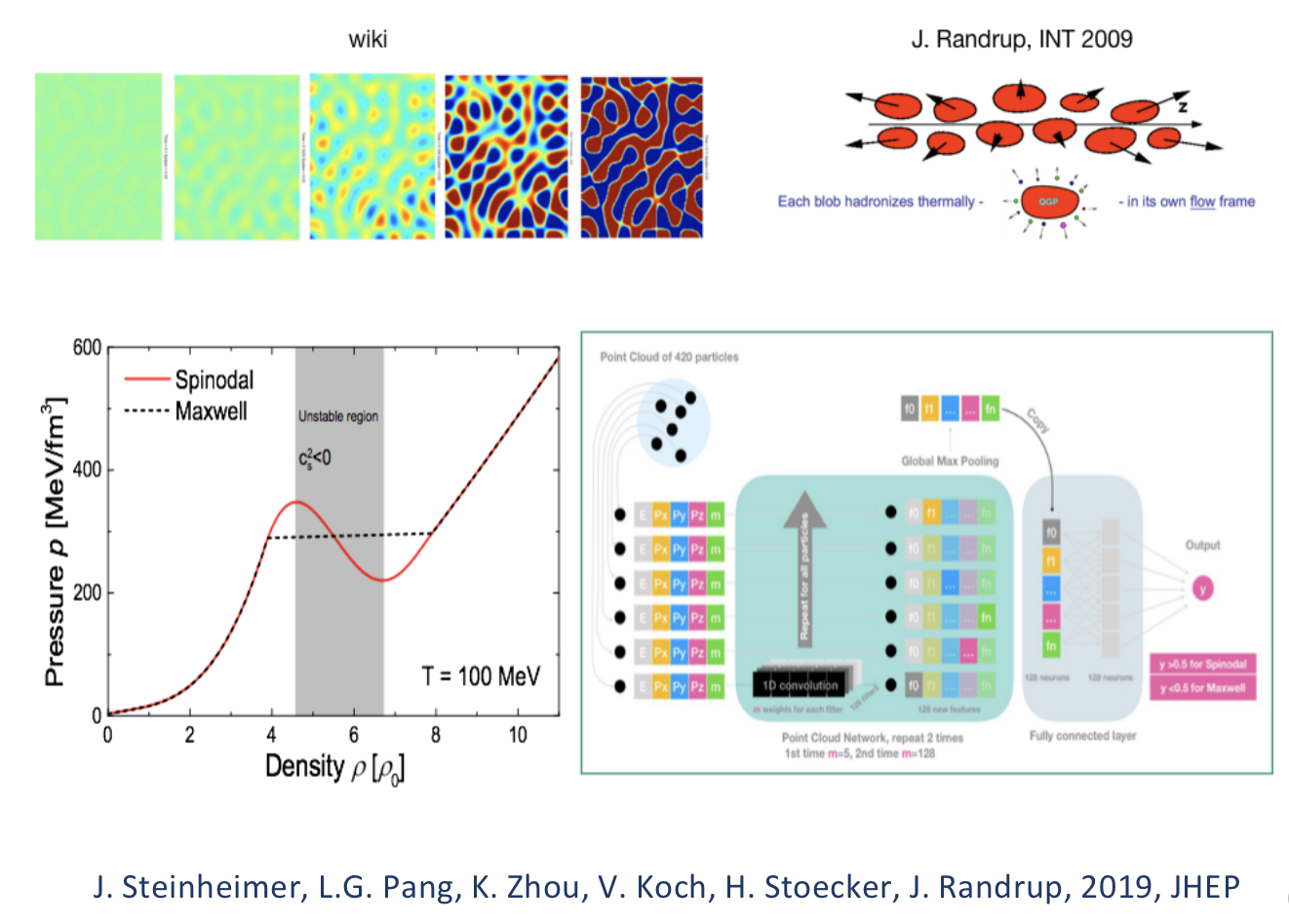
QCD 状态方程与临界点
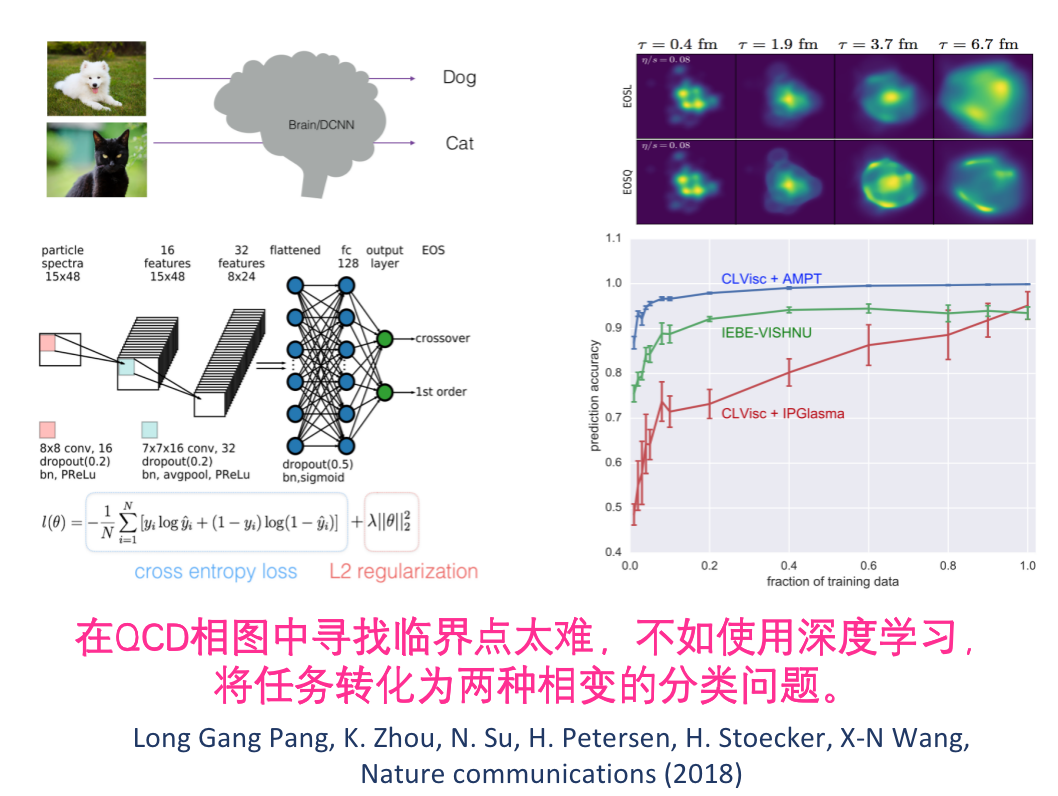
将临界点的寻找转化为相变分类问题
Maxwell and Spinodal 相变分类
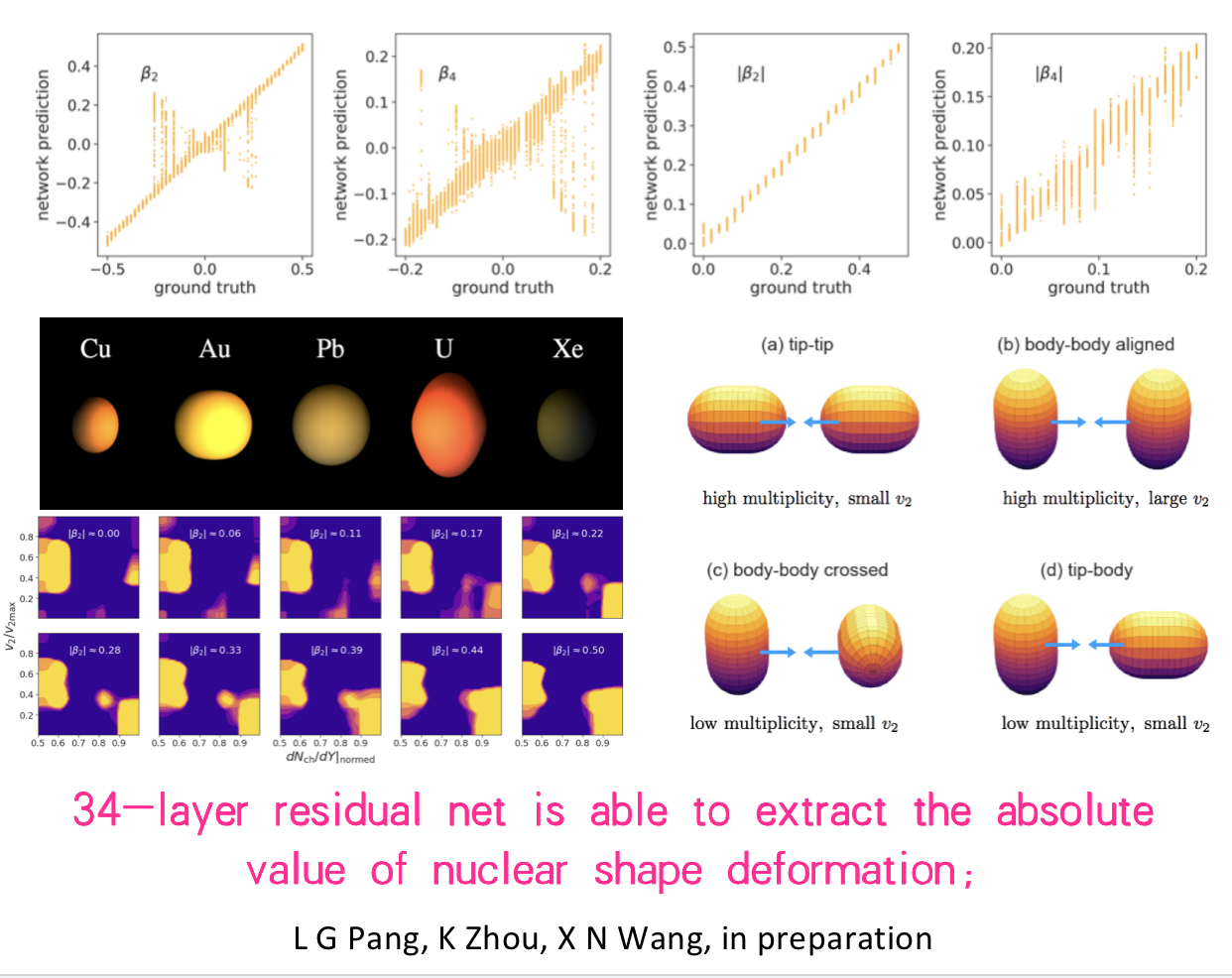
通过相对论重离子碰撞确定核变形
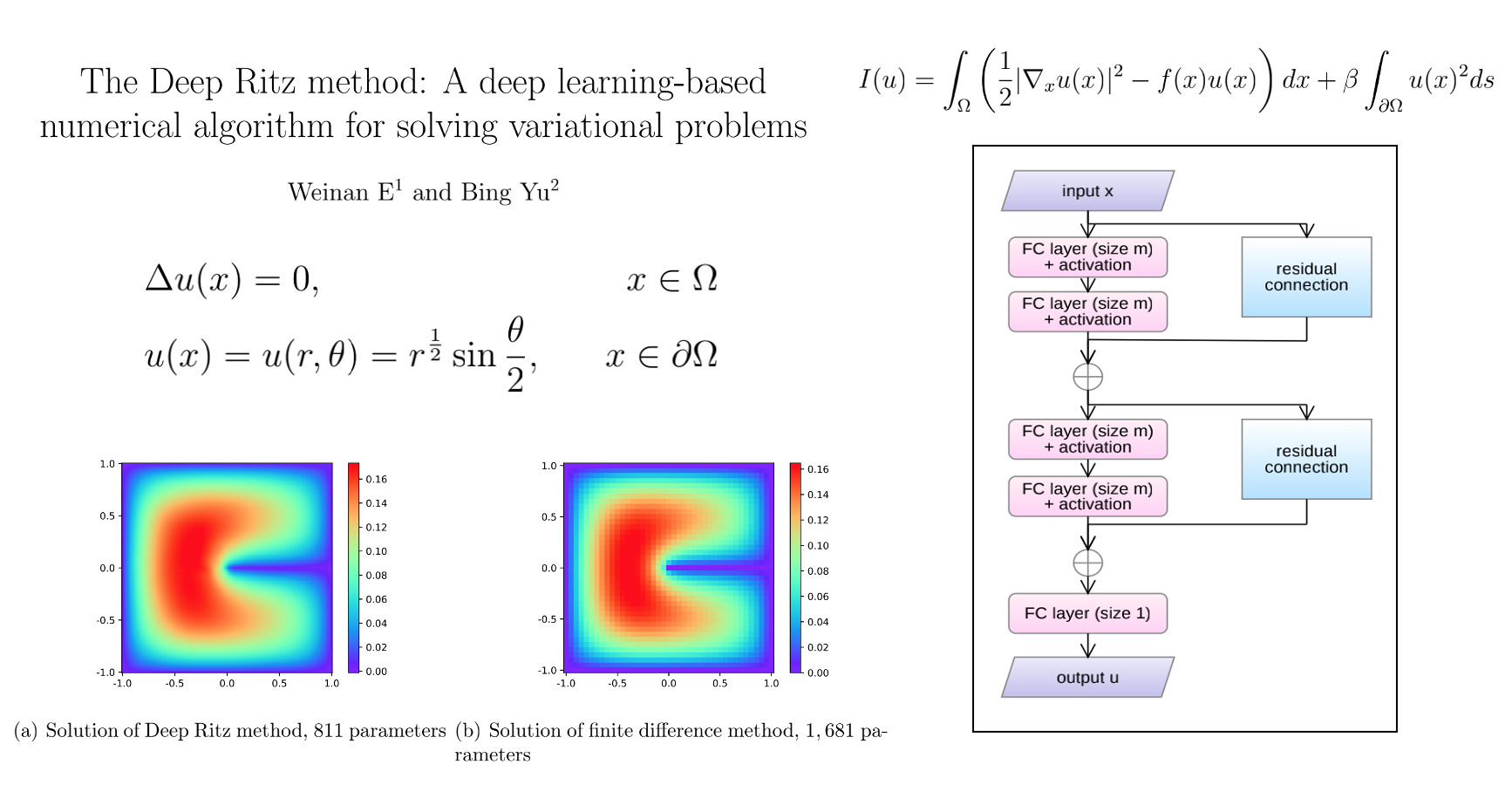
用神经网络表示偏微分方程的变分解
变分蒙特卡洛:RBM for ISing 变分波函数
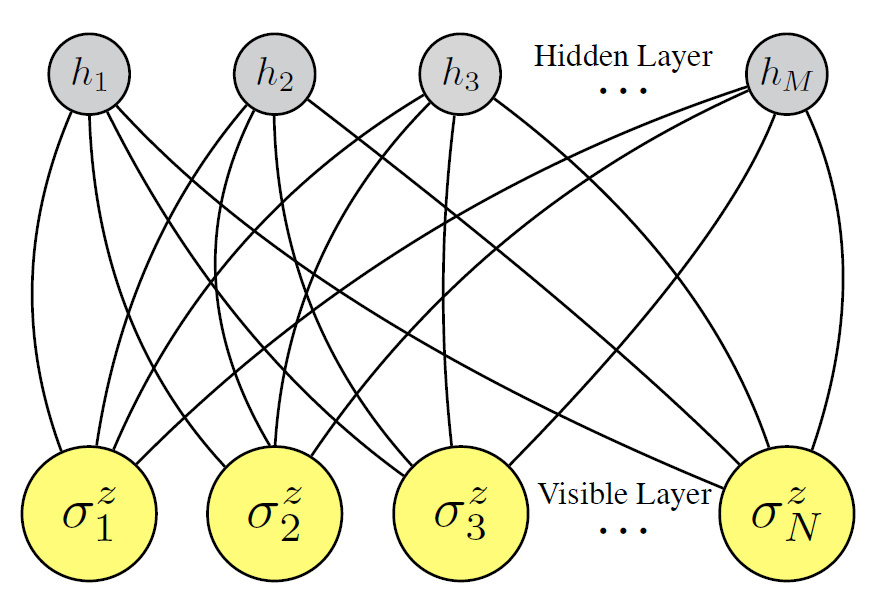
\[E_{\theta}=\frac{\left\langle\Psi_{\theta}|H| \Psi_{\theta}\right\rangle}{\left\langle\Psi_{\theta} \mid \Psi_{\theta}\right\rangle}\]
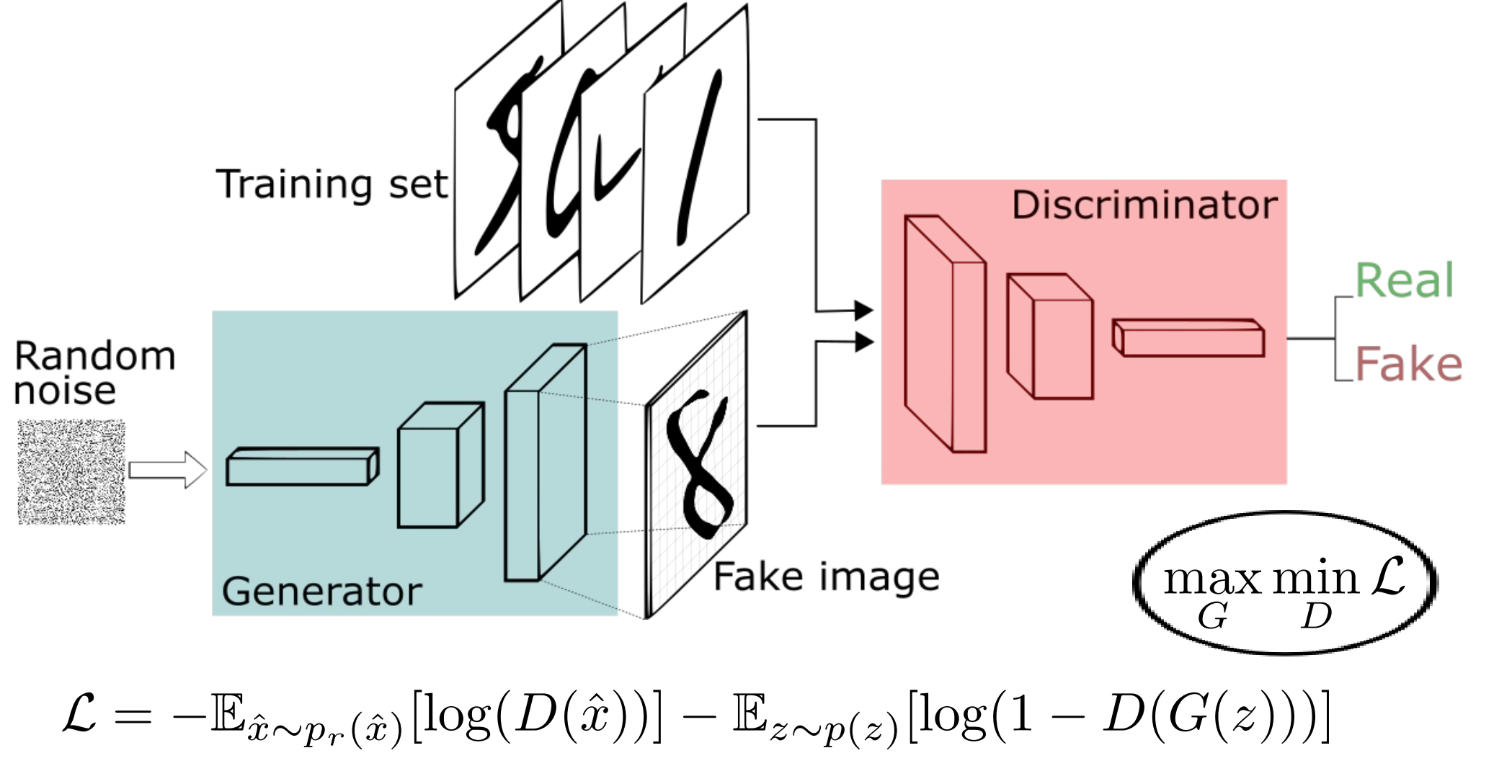
生成格点量子场论构型 (生成对抗网络)
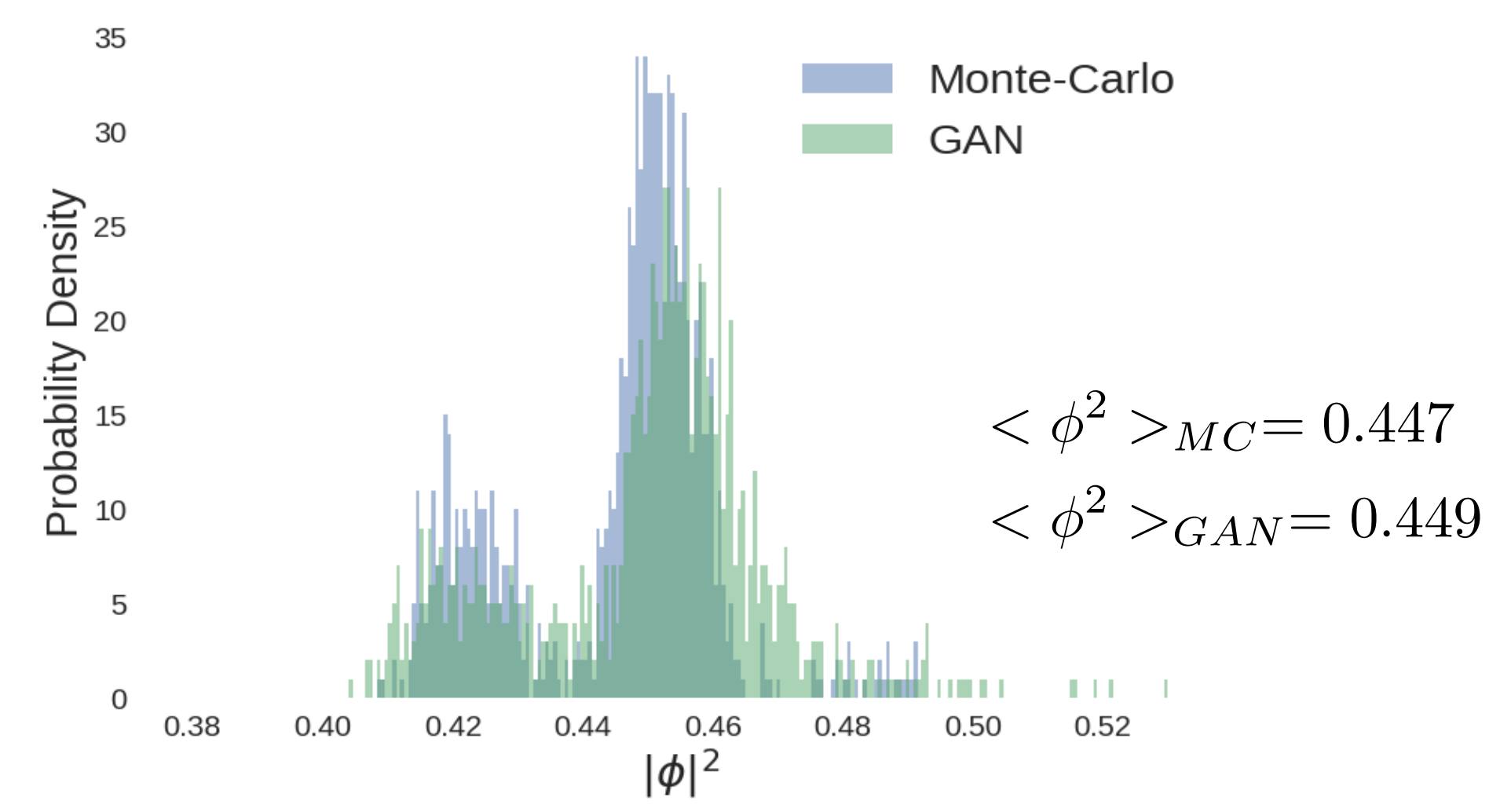
生成格点量子场论构型 (生成结果)
加速天体物理模拟
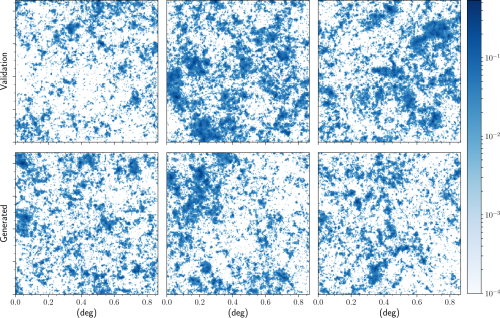
CosmoGAN: Training a Neural Network to Study Dark Matter
自回归模型解统计力学问题

![]()
\[P(z) = P(z_0) P(z_1 | z_0) P(z_2 | z_0 z_1) \cdots P(z_m | z_0 z_1 z_2 \cdots z_{m-1})\]
流模型: 双射,可逆的生成模型
在流模型中加入辛条件,实现特征解耦的抽样。
Neural Canonical Transformation with Symplectic Flows; ShuoHui Li, C.X. Dong, L.F. Zhang, L. Wang; PRX2020
重整化群解释

\[f(x) = \sigma(... \sigma(\sigma(x W + b) W + b) + b) \]
- CNN从浅到深逐层粗粒化特征提取
- 重整化群: 递归粗粒化得到给定尺度下最相关的物理特征
- 文章证明重整化群与深度信仰网络(多层受限玻尔兹曼机)存在精确映射
规范等变卷积
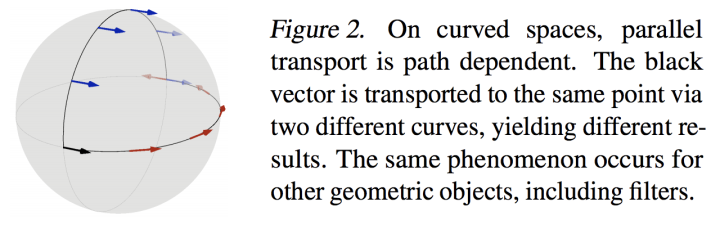
使用群论,构造平移和旋转等变的卷积
Spherical CNNs. Taco S. Cohen, Mario Geiger, Jonas Koehler, Max Welling. (ICLR), 2018
拉格朗日神经网络: 内嵌物理先验
使用神经网络构造正定的机器人质量矩阵 M(q)。
\[ L = T - V; \; T=\frac{1}{2} \dot{\mathbf{q}}^{T} \mathbf{M}(\mathbf{q}) \dot{\mathbf{q}}\] \[ \frac{d}{d t} \frac{\partial L}{\partial \dot{q_{i}}}-\frac{\partial L}{\partial q_{i}}=\mathbf{\tau}_{i} \]
\(\tau_i\) 是待预测的电机驱动力。
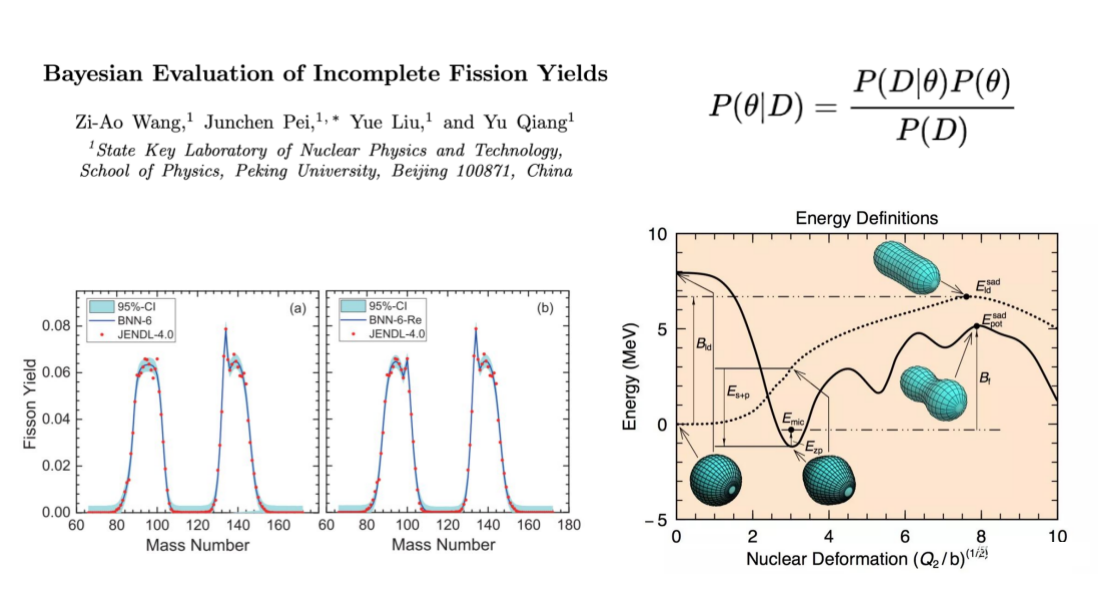
裂变碎片产额分布
核质量与核裂变
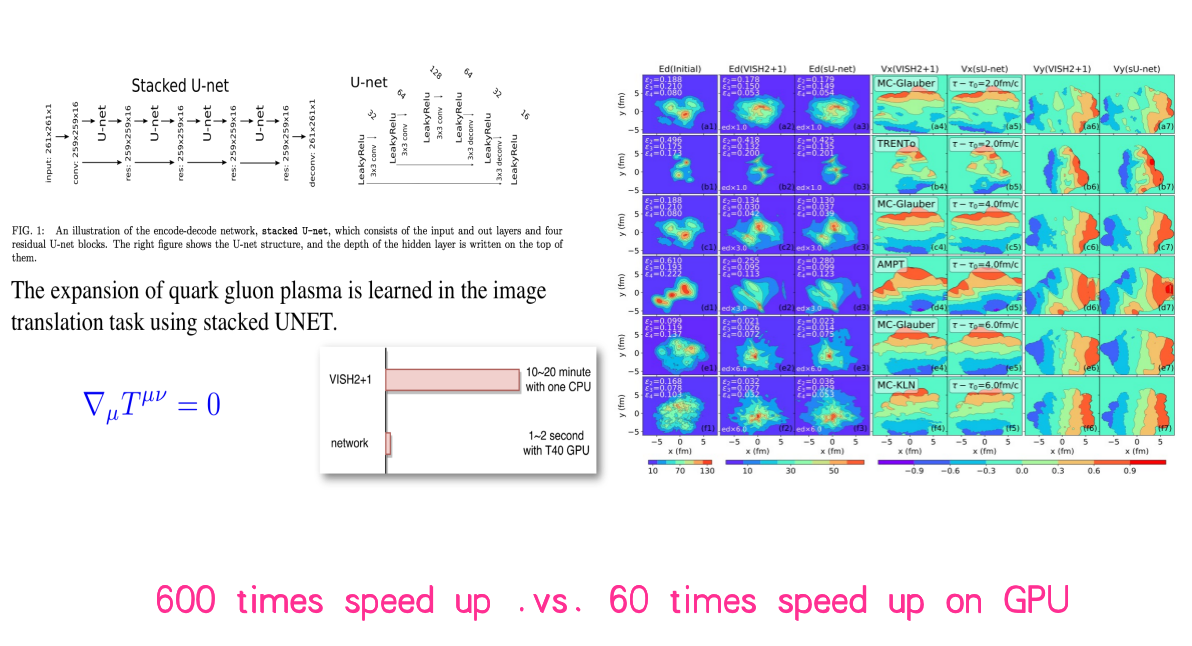
相对论流体力学
arXiv: 1801.03334; NPA2018, H.Huang, B.Xiao, H.Xiong, Z.Wu, Y. Mu and H.Song